Le centre d'inertie d'un objet, ou centre de masse, est le point de l'espace où l'on applique les effets d'inertie, c'est-à-dire le vecteur variation de quantité de mouvement . Si la masse du système est constante, ce que nous supposerons pour simplifier par la suite, alors , étant l'accélération. C'est aussi le point où l'on applique le vecteur force d'inertie résultant de l'accélération d'entraînement dans le cas d'un référentiel non galiléen.



Si l'on veut faire tourner l'objet autour d'un axe de direction donnée, alors l'axe pour lequel il faut fournir le moins d'effort est l'axe passant par le centre d'inertie. Si l'axe de rotation ne passe pas par le centre d'inertie, cela génère des vibrations dans le système ; il a du « balourd ».
Dans le cas où l'on peut considérer le champ de gravité uniforme, le centre d'inertie est confondu avec le centre de gravité. On le note de fait G.

Historique
Importance du concept
Basculement d'un objet soumis à une accélération
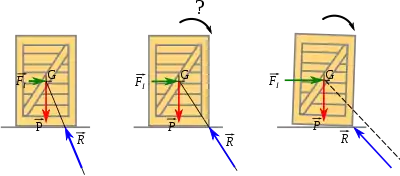

Considérons un véhicule muni de suspensions — motocyclette, voiture, autobus… — qui freine. On voit l'avant du véhicule plonger. À l'inverse, même si c'est moins visible, lorsque le véhicule accélère linéairement, l'avant se relève, ce qui permet par exemple aux deux-roues de faire des roues arrière.
Dans un virage, les véhicules à quatre roues s'inclinent vers l'extérieur du virage ; les deux-roues doivent se pencher vers l'intérieur pour éviter la chute.
Si un objet est posé sur le plancher du véhicule, toute accélération au sens large du terme — augmentation ou diminution de la vitesse, modification de la direction — peut provoquer sa chute.
Pour décrire ces effets en rotation, il faut pouvoir définir un point d'application aux effets d'inertie. En statique analytique, le principe fondamental de la dynamique en rotation s'exprime en général par rapport au centre de masse (puisque l'on a en général le moment d'inertie par rapport à G), cet effet d'inertie est alors masqué puisque son moment par rapport à ce point est nul. Ce n'est pas le cas si l'on considère le moment par rapport à un autre point, ou bien si l'on veut utiliser des méthodes de résolution graphiques.
Par ailleurs, pour une étude statique ou dynamique, toute force volumique qui s'exerce de manière uniforme peut se modéliser par un vecteur force s'appliquant au centre d'inertie. C'est le cas par exemple d'un objet en matériau ferromagnétique dans un champ magnétique uniforme.
Mise en rotation autour d'un axe fixe
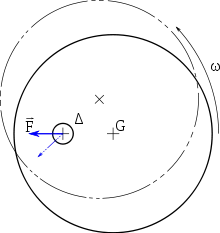
Considérons un disque que l'on veut faire tourner autour d'un axe Δ perpendiculaire à sa face, fixe dans le référentiel galiléen. Pour créer une accélération angulaire α donnée, l'effort à fournir est moindre si l'axe Δ passe par le centre d'inertie (figure de gauche) que s'il est excentré (figure de droite). Ceci se traduit par le théorème de Huygens pour le calcul du moment d'inertie.
Par ailleurs, lors de la rotation, si le centre d'inertie n'est pas sur l'axe, cela signifie que l'axe doit exercer une force sur le disque pour créer une accélération centrale centripète. Cette force tournant avec l'objet, cela crée des vibrations. Ces vibrations peuvent être créées volontairement, par exemple pour les vibreurs, ou bien être involontaires, auquel cas elles sont nuisibles : elles provoquent des bruits, de l'usure prématurée, le desserrage d'éléments vissés, un phénomène de fatigue pouvant amener à la rupture de l'axe, …
Pour un objet en rotation, la connaissance de la position du centre d'inertie est donc capitale pour déterminer l'axe de rotation idéal, notamment aux fréquences de rotation élevées.
Détermination de la position du centre d'inertie
Pour un système de n points matériels discrets assortis de leur masse (Mi, mi)1 ≤ i ≤ n , le centre d'inertie est le barycentre des masses

avec m = ∑mi. Il possède donc toutes les propriétés d'un barycentre à coefficients de pondération strictement positifs, et en particulier :
- le centre de masse de deux points (M1, m1) et (M2, m2) se trouve dans le segment de droite ouvert ]M1M2[ ;
- soient trois points matériels (Mi, mi)1 ≤ i ≤ 3 de centre de gravité G ; si G1, 2 est le centre de masse de (M1, m1) et (M2, m2), alors G est le centre de masse de (G1, 2, m1 + m2) et de (M3, m3).
Dans un repère orthonormé, en coordonnées cartésiennes, si l'on note les coordonnées des points Mi(xi , yi , zi) et G(xG, yG, zG), alors cela donne

Pour un objet continu de masse volumique, uniforme ou non, ρ(M), on a


avec . Si la masse volumique ρ est uniforme, alors


avec . Le centre d'inertie est donc le « centre géométrique », c'est-à-dire le barycentre en considérant que tous les points de l'objet ont la même pondération (isobarycentre).

Certains logiciels de dessin assisté par ordinateur de type modeleur 3D calculent d'eux-mêmes le centre d'inertie de l'objet dessiné, en supposant une masse volumique uniforme. Par exemple :
- dans SolidWorks édition 2008, la position du centre de masse, appelé « centre de gravité », s'obtient avec le menu
Outils > Propriétés de masse.
Les méthodes de détermination dans des cas simples ainsi que les méthodes graphiques et expérimentales sont décrites dans l'article Centre de gravité#Détermination du centre de gravité, puisque dans la plupart des cas le centre d'inertie est confondu avec le centre de gravité.
Propriétés en dynamique
Soit un système Σ, qui peut être un ensemble discret ou continu, indéformable ou déformable. La trajectoire du centre de gravité G de ce système est déterminée en considérant les forces extérieures qui s'exercent sur Σ, c'est-à-dire les forces extérieures à Σ qui s'exercent sur chacun des éléments de Σ. Les efforts entre les éléments du système n'interviennent pas. On a donc

où m est la masse totale de Σ.
Ainsi, par exemple si un obus explose en vol et que l'on néglige le frottement de l'air, alors la trajectoire du centre de gravité de tous les éclats suit la même trajectoire que si l'obus était intègre.
Démonstrations
Cas de deux points matériels
Étude du point matériel (G, m)
On se place dans un référentiel galiléen Rg de repère . Considérons deux points matériels discrets (M1, m1) et (M2, m2). Le point M1 subit des forces dont la résultante — la somme vectorielle — est notée ; de même, désigne la résultante des forces sur M2. Le système Σ est l'ensemble des deux points matériels : Σ = {(M1, m1) ; (M2, m2)} ; l'environnement de ce système est noté Σ (« complémentaire de sigma »).



Appliquons le principe fondamental de la dynamique à chaque point matériel :

L'accélération du centre de masse vaut

soit
- .

On voit donc que le centre de masse se comporte comme un point matériel de masse m = m1 + m2 qui subirait l'ensemble des forces s'exerçant sur les points matériels du système Σ. Le centre d'inertie permet donc de simplifier l'étude du système.

La résultante des actions s'exerçant sur le point matériel M1 peut se décomposer en :

- est la résultante des actions qu'exerce l'extérieur du système Σ sur M1 ; on le note également , ou ;
- est la résultante des actions de M2 sur M1 ; il peut s'agir d'attraction gravitationnelle, électrostatique, d'action de contact (traction via un câble, poussée directe ou via une barre, …) ; on le note également .






De même, on décompose . D'après le principe des actions réciproques (troisième loi de Newton), on a

- .

Il en résulte que
- .

La résultante des actions s'exerçant sur le centre de gravité de Σ se réduit aux actions extérieures à Σ. Les forces internes au système Σ, les actions entre M1 et M2, « disparaissent du bilan »
- On peut donc simplifier l'étude en étudiant le point matériel (G, m) comme substitut de l'ensemble Σ = {(M1, m1) ; (M2, m2)}. Les actions mécaniques s'exerçant sur (G, m) sont les actions extérieures s'exerçant sur Σ, c'est-à-dire les actions de Σ sur Σ.
L'extension au cas de n points se fait en considérant les propriétés mathématiques du barycentre.
Étude des points matériels (M1, m1) et (M2, m2) dans le référentiel du centre de masse
Plaçons nous maintenant dans le référentiel du centre de masse R' de repère . Les points matériels subissent des forces d'inertie et . La résultante des forces sur le point matériel M1 s'écrit :



- .

Pour le point matériel M2, cela s'écrit :
- .

On voit que dans ce référentiel a priori non galiléen, les points matériels sont soumis à des forces de résultantes opposées et de même intensité : .

Notons qu'ici,

comme nous étudions « l'intérieur » du système Σ, il est normal que l'on retrouve les actions intérieures à Σ.
Cas d'un solide indéformable
Si les points matériels sont liés par une barre indéformable de masse négligeable — la distance M1M2 est constante —, alors Σ constitue ce que l'on appelle un « solide indéformable ». Dans le référentiel du centre de masse R', le solide Σ a un mouvement de rotation autour d'un axe instantané passant par G, puisque les distances GM1 et GM2 sont elles aussi constantes — l'orientation de l'axe peut varier au cours du temps. On peut donc définir un vecteur vitesse angulaire instantanée tel que la vitesse des points matériel dans R' vaut :



et le vecteur accélération angulaire instantanée tel que les accélérations, qui se réduisent à leur composante tangentielle, des points matériel dans R' vaut :


et de même
- .

Le moment de la force par rapport à G s'écrit :


où est le vecteur directeur unitaire du vecteur moment. Si l'on note R1 = GM1 et R2 = GM2, on a :


et de même
- .

On appelle moment d'inertie par rapport à l'axe (Δ) = les quantités

- JΔ1 = m1R12sin((M1M2), (Δ))
- JΔ2 = m2R22sin((M1M2), (Δ))
et l'on a donc


Les deux vecteurs ont la même orientation, puisque et sont colinéaires et de sens inverse, et que et sont également colinéaires et de sens inverses.



Dans le référentiel R', le solide Σ est soumis à un couple total de moment
- .

Conclusion
L'étude dynamique du système Σ des points matériels (M1, m1) et (M2, m2) peut se décomposer en deux parties :
- l'étude du point matériel (G, m) dans le référentiel galiléen Rg, soumis à la résultante des forces extérieurs à Σ ;
- l'étude des points matériels (M1, m1) et (M2, m2) dans le référentiel du centre de masse R' ;
- dans le cas où Σ est un solide indéformable, on peut définir le moment d'inertie JΔ (en kg⋅m2) par rapport à l'axe d'accélération angulaire instantanée Δ, qui décrit la répartition de la masse de l'objet autour de l'axe, et qui fournit pour la rotation une équation similaire au principe fondamental de la dynamique en translation :
- .

Exemples
Illustrons la simplification qu'apporte le centre d'inertie par deux cas particuliers.
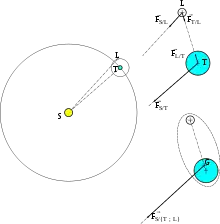
Le premier cas est celui du système {Soleil, Terre, Lune} (problème des trois corps) dans le référentiel héliocentrique : on peut considérer la Terre et la Lune comme deux points matériels,
- la Terre est soumise à l'attraction du Soleil, , et à l'attraction de la Lune ;
- la Lune est soumise à l'attraction du Soleil, , et à l'attraction de la Terre .




Pour simplifier l'étude, on considère le système {Terre, Lune} comme s'il s'agissait d'un objet unique. La résultante des forces s'exerçant sur le centre d'inertie du système {Terre, Lune} vaut donc .

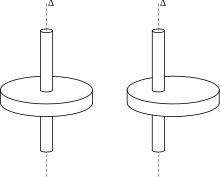
Le second cas est celui de deux boules {1 ; 2} reliées par une barre rigide de masse négligeable, dans le référentiel terrestre.
- La boule 1 est soumise à son poids et à l'action de l'autre boule relayée par la barre ;
- la boule 2 est soumise à son poids et à l'action de l'autre boule relayée par la barre .



Pour simplifier l'étude, on considère le système {1 ; 2} comme s'il s'agissait d'un objet unique. La résultante des actions s'exerçant sur le centre de gravité de {1 ; 2} se réduit également aux actions extérieures .

Cas d'un solide continu indéformable
Un solide continu Σ est défini par sa masse volumique ρ(M), où M est un point de Σ. On considère l'élément de volume infinitésimal dV autour de M ; il constitue un point matériel (M, ρ(M)dV). Le centre d'inertie de Σ se détermine en prenant le centre de masse mathématique des points (M, ρ(M)dV), qui est une version continue du barycentre :

avec
- .
Le principe fondamental de la translation du point matériel (G, m) dans le référentiel galiléen Rg s'écrit

où est la résultante des forces extérieures s'exerçant sur Σ.

Voir aussi
- Centre de gravité
- Centre de pression