I2C (signifie : Inter-Integrated Circuit, en anglais) est un bus informatique qui a émergé de la « guerre des standards » lancée par les acteurs du monde électronique. Conçu par Philips pour les applications de domotique et d’électronique domestique, il permet de relier facilement un microprocesseur et différents circuits, notamment ceux d’un téléviseur moderne : récepteur de la télécommande, réglages des amplificateurs basses fréquences, tuner, horloge, gestion de la prise péritel, etc.
Il existe d’innombrables périphériques exploitant ce bus, il est même implémentable par logiciel dans n’importe quel microcontrôleur. Le poids de l’industrie de l’électronique grand public a permis des prix très bas grâce à la production de masse.
Ce bus porte parfois le nom de TWI (Two Wire Interface) ou TWSI (Two Wire Serial Interface) chez certains constructeurs.
Historique
La norme I2C (Inter-Integrated Circuit) a été développée par Philips en 1982. Depuis elle est maintenue par NXP (ex-division semiconducteurs de Philips).
La version 1.0 a été publiée en 1992, la version 2.0 en 1998, la version 2.1 en 2000, la version 3.0 en 2007, la version 4 en , la version 5 en et la 6e version en .
Couche physique
Topologie
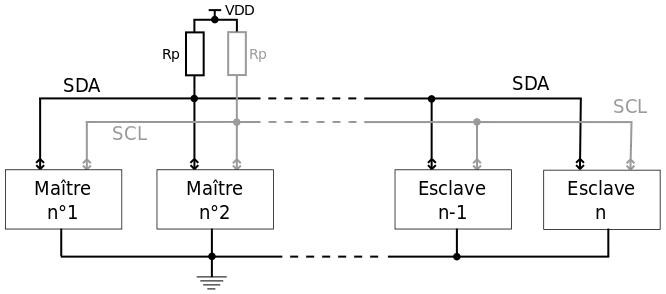
I2C est un bus série synchrone bidirectionnel half-duplex, où plusieurs équipements, maîtres ou esclaves, peuvent être connectés au bus.
Les échanges ont toujours lieu entre un seul maître et un (ou tous les) esclave(s), toujours à l'initiative du maître (jamais de maître à maître ou d'esclave à esclave). Cependant, rien n'empêche un composant de passer du statut de maître à esclave et réciproquement.
La connexion est réalisée par l'intermédiaire de deux lignes :
- SDA (Serial Data Line) : ligne de données bidirectionnelle,
- SCL (Serial Clock Line) : ligne d'horloge de synchronisation bidirectionnelle.
Il ne faut également pas oublier la masse qui doit être commune aux équipements.
Les 2 lignes sont tirées au niveau de tension VDD à travers des résistances de pull-up (RP).
Le nombre maximum d'équipements est limité par le nombre d'adresses disponibles, 7 bits d'adressage et un bit R/W (lecture ou écriture), soit 128 périphériques, mais il dépend également de la capacité (CB) du bus (dont dépend la vitesse maximale du bus). Il faut savoir que des adresses sont réservées pour diffuser des messages en broadcast et que de nombreuses adresses sont déjà attribuées par les fabricants ce qui limite grandement le nombre d'équipements (une variante d'adressage sur 10 bits existe également).
En mode "Ultra-fast mode" (UFm), le bus est unidirectionnel, il ne peut donc y avoir qu'un seul maître. Les 2 lignes sont renommées USCL (ligne d'horloge) et USDA (ligne de données), et côté maître, elles sont toujours en sortie et de type push-pull. Ce mode a un usage limité : seules les écritures sont possibles car dans ce mode le fil de donnée (SDA) n'est pas bidirectionnel.
Codage des bits
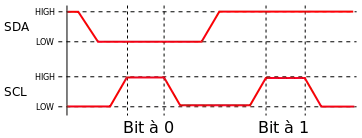
Le niveau (« HIGH » ou « LOW ») de la ligne SDA doit être maintenu stable pendant le niveau « HIGH » sur la ligne SCL pour la lecture du bit.
Niveaux électriques
Les équipements connectés au bus le sont par des sorties de type drain ouvert (ou collecteur ouvert) sur les deux lignes SDA et SCL.
Les équipements sont donc câblés sur le bus par le principe du « ET câblé », ce qui veut dire qu'en cas d'émission simultanée de deux équipements, la valeur 0 écrase la valeur 1.
On dit donc :
- que l'état logique « 0 » ou « LOW » est l'état « dominant »,
- que l'état logique « 1 » ou « HIGH » est l'état « récessif ».
Lorsque le bus n'est pas utilisé, il est au niveau haut (VDD à travers les résistances de pull-up RP).
Les niveaux utilisés entre les lignes de bus sont proportionnels à VDD :
| État | Niveau |
|---|---|
| Dominant ou « 0 » ou « LOW » | de -0,5 V à 0,3x VDD |
| Récessif ou « 1 » ou « HIGH » | de 0,7x VDD à VDD |
Sur certains anciens circuits, les niveaux utilisés peuvent être fixes et donnés par les formules suscitées pour une valeur de VDD = 5 V.
Temps et vitesses
Il existe cinq vitesses de transmission :
- « Standard mode (Sm) » ≤ 100 kbit/s,
- « Fast mode (Fm) » ≤ 400 kbit/s,
- « Fast plus mode (Fm+) » ≤ 1 Mbit/s,
- « High-speed mode (Hs-mode) » ≤ 3,4 Mbit/s,
- « Ultra-fast mode (UFm) » ≤ 5 Mbit/s, unidirectionnel uniquement.
Le bus étant synchrone, le maître impose l'horloge via la ligne SCL, il existe des temps minimum à respecter pour les paliers des niveaux « LOW » et « HIGH » sur cette ligne :
| Mode | tLOWmin | tHIGHmin |
|---|---|---|
| Standard | 4,7 μs | 4 μs |
| Fast | 1,3 μs | 0,6 μs |
| Fast plus | 0,5 μs | 0,26 μs |
Pour les deux vitesses supérieures, les temps dépendent de la capacité du bus (CB).
Calcul des résistances RP
Les temps et les niveaux de tension dépendent de la capacité du bus (CB) et de la valeur des résistances de pull-up (RP).
Il est difficile de modifier la valeur de la capacité du bus, mais on peut choisir la valeur des résistances pull-up.
RPmin
La valeur minimale des résistances de pull-up est limitée par le courant des sorties SDA et SCL (IOL) lorsqu'elles sont à l'état LOW (VOL) :

| Mode | VOLmax | IOL | RPmin pour VDD=5V |
|---|---|---|---|
| Standard | 0,4 V | 3 mA | 1 534 Ω |
| Fast | 0,6 V | 6 mA | 733 Ω |
| Fast plus | 0,4 V | 20 mA | 230 Ω |
Pour les deux vitesses supérieures, les valeurs de IOL ne sont pas fournies.
RPmax
La valeur maximale de RP est limitée par les temps de montée et de descente.
La variation du signal est donnée par la formule :

Soit pour une variation de LOW = 0,3x VDD à HIGH = 0,7x VDD (choisie comme référence) :
- →
- →






avec tr, le temps de montée des signaux SDA et SCL.
| Mode | tr | CB | RPmax |
|---|---|---|---|
| Standard | 1 μs | 400 pF | 2 950 Ω |
| Fast | 300 ns | 400 pF | 885 Ω |
| Fast plus | 120 ns | 550 pF | 257 Ω |
Couche liaison de données
Échange maître ↔ esclave
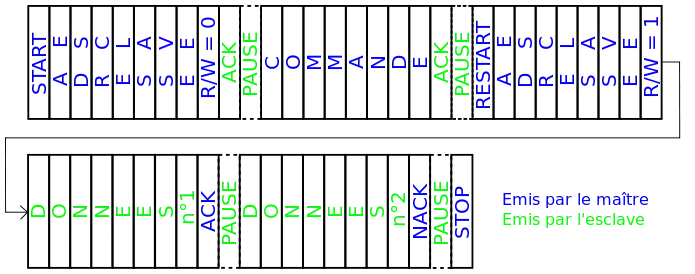
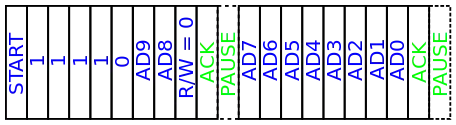
Le message peut être décomposé en deux parties[1] :
- Le maître est l'émetteur, l'esclave est le récepteur :
- émission d'une condition de START par le maître (« S »),
- émission de l'octet ou des octets d'adresse par le maître pour désigner un esclave, avec le bit R/W à 0 (voir la partie sur l'adressage ci-après),
- réponse de l'esclave par un bit d'acquittement ACK (ou de non-acquittement NACK),
- après chaque acquittement, l'esclave peut demander une pause (« PA »).
- émission d'un octet de commande par le maître pour l'esclave,
- réponse de l'esclave par un bit d'acquittement ACK (ou de non-acquittement NACK),
- émission d'une condition de RESTART par le maître (« RS »),
- émission de l'octet ou des octets d'adresse par le maître pour désigner le même esclave, avec le bit R/W à 1.
- réponse de l'esclave par un bit d'acquittement ACK (ou de non-acquittement NACK).
- Le maître devient récepteur, l'esclave devient émetteur :
- émission d'un octet de données par l'esclave pour le maître,
- réponse du maître par un bit d'acquittement ACK (ou de non-acquittement NACK),
- (émission d'autres octets de données par l'esclave avec acquittement du maître),
- pour le dernier octet de données attendu par le maître, il répond par un NACK pour mettre fin au dialogue,
- émission d'une condition de STOP par le maître (« P »).
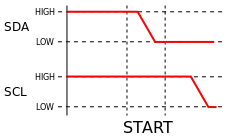
Condition de START
La condition de START est une transgression de la règle de codage des bits qui est utilisée par le maître pour signifier le début d'une trame.
Cette condition est caractérisée par le passage de la ligne SDA du niveau « HIGH » au niveau « LOW » pendant que la ligne « SCL » est maintenue au niveau « HIGH ».
Octet d'adressage
Chaque esclave doit avoir une adresse unique.
Adressage sur 7 bits
L'octet d'adressage peut être scindé en deux parties :
- les sept premiers bits correspondent à l'adresse proprement dite,
- le dernier bit est nommé R/W :
- s'il est à 0, le maître signale qu'il va envoyer des octets, et donc que l'esclave doit les lire,
- s'il est à 1, le maître indique qu'il veut recevoir des octets, et donc que l'esclave doit les fournir.
On peut également considérer que l'adresse est codée sur les 8 bits, chaque esclave a alors deux adresses, l'adresse paire qui sert à lui envoyer des données, l'adresse impaire pour lui demander d'en envoyer.
Plusieurs adresses sont réservées :
- « 00000000 » : utilisée pour adresser tous les esclaves (« broadcast »),
- « 0000001X » : utilisée pour accéder aux composants CBUS (ancêtre de l’I²C),
- « 0000010X » : réservée pour d’autres systèmes de bus,
- « 0000011X » : réservée pour des utilisations futures,
- « 00001XXX » : pour les composants haute-vitesse,
- « 11111XXX » : réservée pour des utilisations futures,
- « 11110yzX » : permet de préciser une adresse sur 10 bits.
Adressage sur 10 bits
Dans le cas d'un adressage sur 10 bits, il faut utiliser deux octets.
Le premier est l'octet « 11110yz0 » (comme précisé ci-dessus), les bits « yz » sont les 2 bits de poids forts de l'adresse, le bit R/W est toujours placé à 0.
Le deuxième octet est utilisé pour les 8 bits de poids faibles de l'adresse, il n'y a pas de bit R/W.
À la suite de l'émission du premier octet, plusieurs esclaves parmi ceux ayant une adresse sur 10 bits peuvent répondre par un ACK (ceux qui ont les mêmes 2 bits de poids fort). Peu importe, à l'issue du 2e octet, seul l'esclave auquel on s'est adressé répondra.
Le bit R/W étant toujours placé à 0, pour demander à un esclave d'écrire, à la suite de l'émission des 2 octets précédents, il faut renvoyer une condition de RESTART suivie de l'octet « 11110yz1 » (avec le bit R/W à 1), pour que l'esclave sache qu'il s'agit d'une commande de lecture.

Acquittement
Le récepteur positionne le bit d'acquittement à :
- « ACK », en forçant la ligne SDA au niveau « LOW », pour signaler la bonne réception de l'octet, équivalent à un bit à 0,
- « NACK », en laissant la ligne SDA au niveau « HIGH », pour signaler un défaut dans la réception de l'octet, équivalent à un bit à 1.
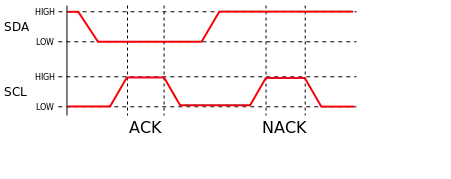
Si le récepteur est dans l'incapacité de recevoir l'octet, il ne positionnera pas le bit d'acquittement, et celui-ci sera de facto un NACK.
Quand le maître est le récepteur, il positionne également le bit d'acquittement à NACK pour interrompre le dialogue, avant d'envoyer la condition de STOP.
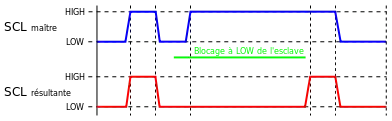
Pause (clock stretching)
À tout moment, l'esclave peut « bloquer » la ligne SCL au niveau « LOW » pour signaler qu'il est occupé.
Lorsque le maître fournit un niveau « HIGH » sur la ligne SCL, il détecte l'écrasement. Le maître doit continuer à fournir le niveau « HIGH » sur la ligne.
Lorsque l'esclave est à nouveau prêt, il libère la ligne SCL et celle-ci prend alors immédiatement le niveau « HIGH », le cycle reprend.
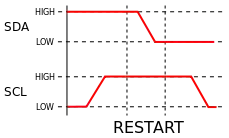
Condition de RESTART
La condition de RESTART est une transgression de la règle de codage des bits qui est utilisée par le maître pour signifier le début d'une nouvelle trame dès la fin de la trame précédente sans passer par une condition de STOP.
La condition de RESTART est similaire à la condition de START, à cela près que la ligne SCL doit d'abord passer du niveau « LOW » au niveau « HIGH ».
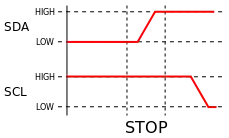
Condition de STOP
La condition de STOP est une transgression de la règle de codage des bits qui est utilisée par le maître pour signifier la fin d'une trame.
Cette condition est caractérisée par le passage de la ligne SDA du niveau « LOW » au niveau « HIGH » pendant que la ligne SCL est maintenue au niveau « HIGH ».
Multi-maîtres
Synchronisation des horloges
La synchronisation est réalisée grâce au principe du « ET câblé » sur la ligne SCL :
- elle est maintenue à l'état « LOW » tant qu'un des maîtres la maintient à l'état « LOW »,
- elle est maintenue à l'état « HIGH » tant que tous les maîtres la maintiennent à l'état « HIGH ».
Les maîtres peuvent avoir des durées de maintien de « HIGH » et de « LOW » différentes des autres maîtres, cependant ils ne doivent commencer à compter cette durée que lorsque la ligne SCL est au niveau voulu.
Cela signifie que si un maître passe de « LOW » à « HIGH » et qu'il veut imposer le niveau « HIGH » pendant 5 ms, il ne pourra commencer ce maintien durant 5 ms que lorsque la ligne SCL sera à « HIGH », soit lorsque tous les maîtres seront à « HIGH », donc la durée du maintien peut être plus longue.
Ce mécanisme implique que, la durée de maintien de la ligne SCL :
- à l'état « LOW » est imposée par le maître ayant la durée correspondante la plus longue,
- à l'état « HIGH » est imposée par le maître ayant la durée correspondante la plus courte.
Arbitrage des maîtres
Plusieurs règles doivent être respectées par les maîtres :
- lorsqu'un maître envoie une condition de START, les autres maîtres le détectent, et se taisent jusqu'à l'émission d'une condition de STOP,
- à la suite de l'émission de la condition de STOP, le maître l'ayant émis dispose d'un délai pour écrire une nouvelle trame, s'il ne l'a pas fait à l'issue de ce délai, le bus est considéré comme libre :
| Mode | Durée avant « bus libre » |
|---|---|
| Standard | 4,7 μs |
| Fast | 1,3 μs |
| Fast plus | 0,5 μs |
| High-speed | (aucune) |
| Ultra-fast | (aucune) |
- Le bus étant libre, les autres maîtres peuvent accéder au bus.
- Dans le cas particulier où plusieurs maîtres accéderaient au bus simultanément (en envoyant simultanément une condition de START), les maîtres doivent monitorer ce qu'ils écrivent sur le bus, si un niveau « HIGH » écrit est lu « LOW », c'est qu'un autre maître émet, il doit alors immédiatement interrompre sa propre transmission et attendre la condition de STOP.
Trois conclusions :
- Les messages adressés aux esclaves ayant les adresses les plus petites (avec les bits de poids forts à 0) sont prioritaires,
- En cas d'adresses identiques, l'écriture est prioritaire sur la lecture,
- En cas de collision, le message prioritaire arrive à l'esclave sans avoir été altéré.
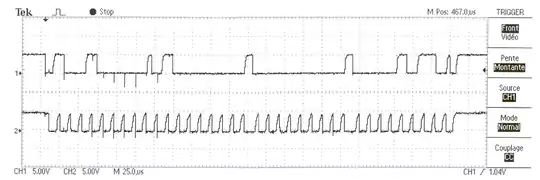
Exemples de trames
- Trame observée avec un oscilloscope.

Support par les systèmes d'exploitations
- Microsoft Windows : I²C est implémenté par des pilotes spécifiques, fournis par les fabricants pour la plupart des contrôleurs et capteurs disponibles sur le marché actuellement.
- Mac OS X : Il y a plus de 20 extensions pour le noyau qui communiquent avec les capteurs pour mesurer la tension, le courant, la température, l'accélération linéaire, la position angulaire et d'autres mesures physiques.
- Linux : I²C est utilisable grâce aux modules spécifiques à chaque matériel fonctionnant au-dessus de la pile I2C implémentée dans le noyau. Il y a des centaines de matériels supportés dans la version courante du noyau Linux.
- FreeBSD, NetBSD et OpenBSD : Une implémentation de la pile I²C est fournie et ils disposent d'un nombre important de pilotes pour des contrôleurs maîtres et des capteurs.
- AmigaOS : le support peut être obtenu avec le composant i2c.resource pour AmigaOS 4.x ou la bibliothèque partagée i2c.library écrite par Wilhelm Noeker pour les systèmes plus anciens.
- eCos : supporte I²C pour plusieurs architectures matérielles.
- Arduino : I²C est utilisable avec la bibliothèque Wire.
- Android : le système d'exploitation Android étant basé sur le noyau Linux, Android bénéficie du support I²C de Linux.
Technologies dérivées
I2C est à la base :
- de l’ACCESS.bus,
- de l’interface VESA Display Data Channel (DDC),
- du System Management Bus (SMBus),
- de l’Intelligent Platform Management Bus (IPMB, l’un des protocoles de l’IPMI).
Ces implantations présentent des différences dans les tensions et les fréquences d’horloge, et peuvent avoir des interrupt lines (IRQ).
Notes et références
- ↑ (en) The I2C-bus and how to use it (including specifications) : 1995 update - Philips Semiconductors, I2c-bus.org, avril 1995 p. 7 [PDF]
Voir aussi
Articles connexes
Liens externes
- (en) Norme I2C : NXP : I2C-bus specification and user manual v.6, du 4 avril 2014
- (en) Représentation détaillée
- (en) Mode d'emploi de l'inventeur Phillips Semiconducteurs : The I2C-bus and how to use it - avril 1995