في الميكانيكا السماوية، الشذوذ اللا تمركزي هو الشذوذ الفعلي للكوكب في المدار الإهليليجي.وهو المعلمة الزاوية التي تحدد موقع الجرم الذي يتحرك على طول مدار كبلر الإهليلجي . وهى احدى المعلمات الزاوية الثلاثة ("الشاذة") و التي تحدد الموقع على طول المدار،والعنصران الآخران هما الشذوذ الحقيقي وزاوية وسط الشذوذ.
التمثيل البياني
تعطي قيمة القطع الناقص في المعادلة:

حيث a المحور شبه الرئيسي الكبير وb هو المحور شبه الصغير.
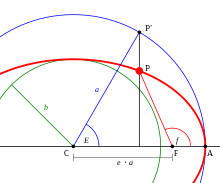
لنقطة على القطع الناقص، P = P(x, y), تمثل موقع جرم يدور في مدار بيضاوي الشكل، والشذوذ اللا تمركزي هي الزاوية E في الشكل إلى اليسار. يرصد شذوذ اللا تمركزي، E ، عن طريق رسم مثلث قائم مع قمة واحدة في مركز القطع الناقص، وبعد الوتر a (ما يعادل المحور شبه الرئيسي للقطع الناقص) والجانب الآخر (متعامد على المحور شبه الرئيسي الكبير ويماس النقطة P 'على نصف قطر القطع الناقص ' 'a' ') الذي يمر خلال النقطة P.
الشذوذ اللا تمركزي يقاس في نفس اتجاه الشذوذ الحقيقي، كما هو موضح في الشكل الذي يمثلة الحرف (f) الشذوذ اللا تمركزي في هذا النسق E يعطى بي [1]

و

المعادلة الثانية تأسس باستخدام العلاقة
- ,

مما يدل على أن الخطيئة E = ±yb. المعادلة الخطيئة E = −yb يمكن استبعادها على الفور لانها تجتاز القطع الناقص في الاتجاه الخاطئ.
الصيغ
الشذوذ اللا تمركزي ونصف القطر
يتم تعريف اللاتمركزية على النحو التالي:

من نظرية فيثاغورس ينطبق على المثلث مع r (مسافة FP) والوتر :

وبالتالي نصف القطر (المسافة من البؤرة إلى نقطة 'P' ') يرتبط بالشذوذ اللا تمركزي بواسطة الصيغة

من الشذوذ الحقيقي
وبهذه النتيجة الشذوذ اللا تمركزي يمكن تحديدة من الشذوذ الحقيقي.[2]

بالتالي:

لذا زاوية E هي الزاوية المتاخمة للمثلث قائم الزاوية مع الوتر 1 + e جتا θ والجانب الآخر e + جتا θ, والجانب المعاكس √1 − e2 sin θ.
من زاوية وسط الشذوذ
يرتبط الشذوذ اللا تمركزي E إلى زاوية وسط الشذوذ M من معادلة كبلر:[3]

انظر ايضا
مراجع
- George Albert Wentworth (1914). "The ellipse §126". Elements of analytic geometry (الطبعة 2nd). Ginn & Co. صفحة 141. مؤرشف من الأصل في 17 فبراير 2017.
- James Bao-yen Tsui (2000). Fundamentals of global positioning system receivers: a software approach (الطبعة 3rd). John Wiley & Sons. صفحة 48. . مؤرشف من الأصل في 11 مايو 2020.
- Michel Capderou (2005). "Definition of the mean anomaly, Eq. 1.68". Satellites: orbits and missions. Springer. صفحة 21. . مؤرشف من الأصل في 11 مايو 2020.