
آلية الأربع قضبان ( four bar mechanism): تعتمد على أربع قضبان أو وصلات متصلة معاً بواسطة مفصلات أو مشتركات وتتحرك بطريقة محددة في دورات مغلقة تعتمد على أطوال القضبان وذلك للقيام بوظائف محددة.[1][2] ويعطى كل قضيب درجة معينة من الحرية تسمح له بالقيام بدورات كامة، هذه الحرية تعتمد بالأساس على مركز الدوران.
وتتكون هذه الآلية من قضيب أساسي يسمى القضيب الأرضي، أو القضيب الثايت (fixed link) ويكون هذا القضيب مثبتاً في جسم ثابت بواسطة أي وسيلة تثبيت، وهذا القضيب لا يتحرك بل يكون أطرافه هي مراكز الدوران للقضيبين الآخرين . فيدور القضيبين الثاني والثالث في شكل دائرتين أنصاف اقطارهما هو أطوال هذه القضبان، ومراكزهما هما نهايتي القضيب الأول، وفي أغلب الحالات يكون القضيب الأول في شكل أرضية الماكينة وليس على شكل القضيب المعتاد.
أما القضيب الرابع فهو متصل بنهايتي القضيبين الثاني والثالث ويدور تبعاً لدوارانهما حول مركز يسمى "مركز لحظي" أي انه يتغير لحظيا تبعاً لتغير المسافة بين القضيبين الثاني والثالث نتيجة لدوارانهما بسرعات زاوية مختلفة أما خط دورانه فيكون في شكل أقواس وليس في شكل دائرة.
وغالبا ما يوضع عند نهاية هذا القضيب أو في منتصفه أو في أي نقطة تنتمي له نظام معين يقوم بأداء وظيفة ميكانيكة محددة .
وتكون سرعة القضبان الخطية هي حاصل ضرب طول القضيب في سرعة الزاوية، ويمكن تحديد سرعة وعجلة أي نقطة على في هذه الآلية بواسطة مجموعة من القوانين الرياضية أو رسم تخطيطي لمضلعات السرعة والعجلة.
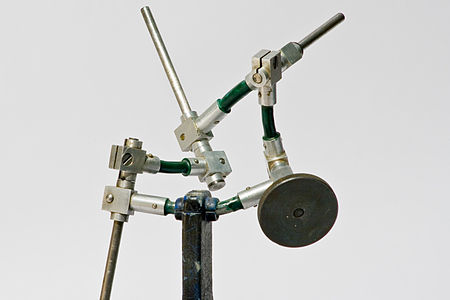
معرض صور


مراجع
- Chakrabarti, Amaresh (2002). Engineering Design Synthesis: Understanding, Approaches and Tools. Great Britain: Springer-Verlag London Limited. .
- Myszka, David (2012). Machines and Mechanisms: Applied Kinematic Analysis. New Jersey: Pearson Education. .