
Une centrale à inertie ou centrale inertielle est un instrument utilisé en navigation, capable d'intégrer les mouvements d'un mobile (accélération et vitesse angulaire) pour estimer son orientation (angles de roulis, de tangage et de cap), sa vitesse linéaire et sa position. L'estimation de position est relative au point de départ ou au dernier point de recalage[1].
La centrale à inertie n'utilise aucune information extérieure au mobile. Malgré les progrès spectaculaires des systèmes de positionnement par satellites, elle reste utilisée sur les avions de ligne dont la sécurité des vols ne peut reposer uniquement sur le GPS, insuffisamment fiable. Généralement, les véhicules militaires en sont également équipés pour pallier les brouillages du GPS susceptibles d'être rencontrés en temps de guerre.
Description
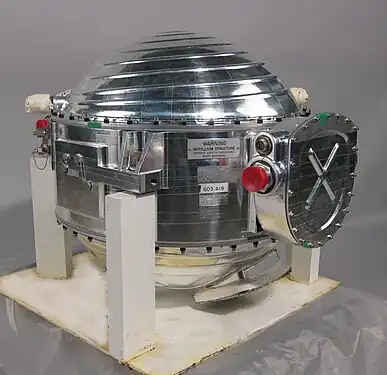
Une centrale à inertie est un équipement de navigation comportant six capteurs d'une précision métrologique :
- trois gyromètres mesurant les trois composantes du vecteur vitesse angulaire (vitesses de variation des angles de roulis, de tangage et de lacet) ;
- trois accéléromètres mesurant les trois composantes du vecteur force spécifique (en). La force spécifique est la somme des forces extérieures autres que gravitationnelles divisée par la masse. Cette quantité a donc la dimension d'une accélération mais, contrairement à ce que suggère le nom de l'instrument de mesure, il ne s'agit pas exactement d'une accélération.
Le calculateur de la centrale à inertie réalise l'intégration en temps réel, uniquement à partir des mesures de ces six capteurs : des angles d'attitude (roulis, tangage et cap), du vecteur vitesse et de la position.
Des centrales à inertie sont installées à bord de véhicules terrestres, de navires, de sous-marins, d'avions, d'hélicoptères, de missiles et de véhicules spatiaux. Elles sont même parfois transportées par des piétons pour des applications de localisation de précision en génie civil quand le GPS n'est pas utilisable (forage de tunnels).
Les désignations habituelles des centrales à inertie sont des acronymes issus de l'anglais : Inertial Reference System (IRS), Inertial Navigation System (INS), ou Inertial Measurement Unit (IMU). Cette dernière appellation désigne le sous-système limité aux seuls capteurs inertiels (gyromètres et accéléromètres), sans calculateur.
Fonctionnement simplifié
À partir d'un point de départ connu, la connaissance à chaque instant des mouvements instantanés (déplacements linéaires et rotations) permet d'estimer les angles d'attitude et le vecteur vitesse courants, mais aussi la position de la centrale inertielle.
La validité de ce principe peut être illustrée en analysant le cas simple d'un mouvement rectiligne et sans rotation, donc à un seul degré de liberté. C'est par exemple la situation d'un wagon sur un tronçon rectiligne d'une voie ferrée.
Vitesse :

où :
- est le temps
- est l'accélération à l'instant
- est la vitesse à l'instant
- est un intervalle de temps infinitésimal




Position :

où :
- est la position à l'instant

Grâce à ces deux équations dites « équations de l'estime », et moyennant la connaissance des vitesse et position initiales, la seule mesure en continu de l'accélération permet d'estimer à chaque instant ultérieur la vitesse et la position .


Le principe est similaire dans le cas du mouvement quelconque d'un véhicule libre de tous ses mouvements dans l'espace à trois dimensions, donc possédant ses 6 degrés de liberté :
- les trois composantes de déplacement de son centre de gravité ; et
- les trois composantes de rotation autour de son centre de gravité.
L'estimation de l'état de ce véhicule requiert la mise en œuvre de trois accéléromètres et de trois gyromètres plutôt que d'un seul accéléromètre. Les équations complètes de l'estime prennent aussi une forme plus compliquée que celles exposées ci-dessus.
Erreurs des capteurs
Dans la pratique, le fonctionnement s'écarte des équations idéales à cause des erreurs qui affectent les mesures des rotations et des accélérations (biais, bruits, facteurs d'échelle, non-linéarités...) et qui engendrent des dérives au cours du temps des estimations des assiettes, de la vitesse et de la position. Contrairement à ce que suggère l'exemple simplifié, le plus gros contributeur à l'erreur d'une centrale à inertie est le gyromètre. Ceci est dû au fait qu'il est intégré une fois de plus que l'accéléromètre, donc le biais de mesure de la vitesse angulaire engendre de plus grandes erreurs que le biais d'accélération.
Une centrale à inertie équipant un avion de ligne transocéanique est typiquement affectée d'une dérive de son estimation de position de l'ordre du NM/h (mille nautique par heure).
Pour atteindre une telle précision, il faut mettre en œuvre des gyromètres présentant des erreurs n'excédant pas quelques centièmes de degrés par heure (notés « °/h ») et des accéléromètres de quelques dizaines de µg d'erreur (micro-g, ou millionième de la gravité terrestre). Ces capteurs inertiels doivent de plus être acquis à des cadences de plusieurs centaines de hertz.
Le coût d'une telle centrale à inertie se chiffre en centaines de milliers de dollars[2].
Hybridation
Plutôt que d'utiliser des capteurs inertiels de très haute performance et donc coûteux, une autre solution pour limiter les dérives d'une centrale à inertie est de mettre en œuvre des algorithmes d'hybridation avec d'autres capteurs que les capteurs inertiels.
Un exemple d'algorithme couramment utilisé est le filtre de Kalman, qui permet d'estimer les biais des différents capteurs grâce à des informations de position ou de vitesse tierces (GPS, capteur de vitesse sol, radar Doppler, odomètre, capteurs de vitesse air…).
De telles hybridations permettent d'utiliser des capteurs inertiels bien moins coûteux, en sacrifiant l'indépendance inhérente aux centrales inertielles.
Dans les applications à haut niveau d'intégrité, telles que les avions long courriers transocéaniques, l'hybridation des centrales de navigation primaires avec le GPS n'est pas acceptable, car une panne du système GPS pourrait se propager sur toutes les sources de navigation et compromettre la sécurité du vol. Les avions de ligne sont donc généralement équipés de trois centrales à inertie de grande précision garantissant une dérive de position de l'ordre d'un mile nautique par heure de vol (1 NM/h), fonctionnant en inertie pure (c'est-à-dire sans hybridation).
Période de Schuler (de)
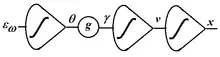
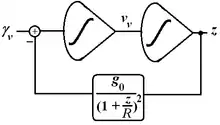
Le schéma-bloc ci-contre est le modèle de propagation des erreurs du gyromètre selon l'un des deux axes Nord ou Est de la plateforme virtuelle. est l'inclinaison de la plateforme virtuelle par rapport à l'horizontale le long de cet axe. Le gain correspond à l'accélération de la pesanteur terrestre. Il relie l'erreur de plateforme (en radians) à l'erreur de projection de la mesure des accéléromètres. Cette représentation linéaire est valide tant que est faible, ce qui est toujours le cas (l'erreur d'inclinaison de la plateforme virtuelle d'une centrale inertielle étant toujours très largement inférieure à 1/10°).


L'erreur de vitesse est donc l'erreur du gyromètre multipliée par et intégrée deux fois. Pour obtenir l'erreur de position, il faut intégrer une troisième fois.
Après une durée de navigation et dans l'hypothèse où les états de la centrale à inertie (attitudes, vitesse et position) auraient été tous parfaitement initialisés, un biais de gyromètre engendrerait l'erreur de position suivante :

- .

Par exemple, après cinq heures de navigation (durée courante du vol d'un avion de ligne), un biais de gyromètre de 1/100 de degré par heure se propagerait, selon cette représentation, en une erreur de navigation de :
- = 462 km.

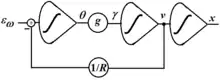
Cette valeur est beaucoup plus élevée que l'erreur usuellement relevée. Mais dans les calculs précédents, la rotondité de la terre a été négligée[3]. Quand le véhicule dans lequel la centrale à inertie est installée se déplace à la vitesse au voisinage du globe terrestre, le plan horizontal local ne reste pas parallèle à lui-même mais bascule autour d'un axe horizontal perpendiculaire au vecteur vitesse, à la vitesse angulaire ( étant le rayon du globe terrestre). Dans un bon algorithme de navigation inertielle, cette vitesse angulaire « de transport » (transport rate en anglais) est donc retranchée de la mesure du gyromètre. Le schéma-bloc de propagation des erreurs devient alors celui ci-contre.



La structure bouclée formée par les deux intégrateurs d'assiette et de vitesse constitue un oscillateur non amorti dont la pulsation propre est égale à la racine carrée du gain de boucle ouverte :


La période propre, dite période de Schuler, est donc :
- = 5 061 s = 84 min

La réponse en erreur de vitesse à un échelon de biais est :

La boucle de Schuler a donc pour effet de borner l'erreur de vitesse. L'amplitude moyenne de celle-ci est :

Dans l'exemple précédent d'un gyromètre affecté d'un biais de 0,01°/h, cette expression vaut 0,3 m/s
Après cinq heures de navigation, l'erreur de position n'est donc finalement que de :
- = 0,3 x 5 x 3 600 = 6 km
Cette valeur est bien plus proche que la précédente des erreurs couramment observées sur les centrales inertielles des avions de ligne, dont la spécification est typiquement de 1 NM/h (mile nautique par heure). La rotondité de la terre et l'oscillation de Schuler qui en résulte sont donc largement bénéfiques et limitent la divergence de l'erreur de position.
Axe vertical
Les principes de l'estimation de la position horizontale ont été exposés. Mais une centrale à inertie a souvent vocation à être utilisée en tant que source de navigation sur les avions, les fusées ou les missiles. La question se pose alors de compléter le positionnement horizontal 2D par une estimation de la position verticale (donc de l'altitude) afin de disposer d'une source de navigation inertielle 3D.
Le principe du calcul d'une altitude inertielle est similaire à celui exposé au paragraphe "fonctionnement simplifié" ci-dessus. L'accélération verticale est intégrée deux fois pour obtenir successivement les estimations de la vitesse verticale et de l'altitude. La différence réside dans le fait qu'un accéléromètre mesure non pas une accélération mais une force spécifique, à laquelle il convient de rajouter l'accélération de la pesanteur terrestre pour trouver une vraie dérivée de vitesse verticale. L'accélération de la pesanteur terrestre décroît avec l'altitude comme le carré de la distance au centre du globe :

Où :
- est l'altitude ;
- est le rayon du globe terrestre ; et
- est l'accélération de la pesanteur à la surface du globe.


Cette dépendance entre gravité et altitude résulte en une boucle dans l'algorithme de calcul, comme illustré par le schéma bloc ci-dessus.
De l'expression précédente on déduit le gradient vertical de la gravité :

Aux altitudes de vol des avions, on peut négliger l'altitude devant le rayon du globe terrestre. Le gradient vaut alors :

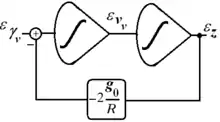
Le modèle linéarisé de la propagation des erreurs illustré ci-contre présente, comme ceux des erreurs horizontales, une structure à deux intégrateurs interconnectés en boucle. Le gain de boucle ouverte y est deux fois plus élevé que celui des boucles horizontales, mais la différence fondamentale réside dans le signe de ce gain. Il était négatif dans les boucles horizontales, rendant la rétroaction plutôt stabilisatrice (bien qu'avec un taux d'amortissement nul). Dans la boucle verticale, il est positif et rend la rétroaction déstabilisatrice, et la réponse divergente.
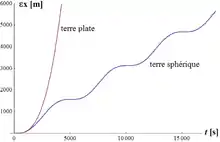
La réponse temporelle à un échelon de biais d'accélération verticale s'obtient par transformation inverse de Laplace de la fonction de transfert déduite de ce schéma bloc :


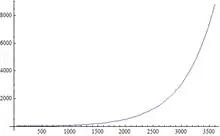
Le graphique ci-contre est le tracé de l'erreur d'estimation d'altitude inertielle en présence d'un biais d'accélération de 10 µg et sous hypothèse d'une initialisation parfaite. L'erreur dépasse 8 km au bout d'une heure et atteint une valeur de l'ordre de l'année-lumière au bout des 5 heures de navigation de l'exemple du chapitre traitant des erreurs horizontales !
On peut conclure que l'estimation purement inertielle de l'altitude est impossible du fait de la nature divergente de l'équation différentielle à mettre en œuvre. Elle ne serait éventuellement possible que pour des missions de très courte durée (ex. : celles d'un lanceur spatial).
L'estimation de la position horizontale nécessite pourtant la connaissance de l'altitude pour déterminer la valeur de la gravité terrestre à l'emplacement de la centrale. On utilise pour ce besoin une mesure de la pression atmosphérique : la centrale inertielle d'un aéronef est nécessairement couplée à un baroaltimètre.
Notes et références
- ↑ [PDF] Guy Mercier: LA NAVIGATION INERTIELLE, sur le site ac-lille.fr.
- ↑ [PDF]Basic Principles of Inertial Navigation, site des étudiants en aéronautique de l'université de Delft
- ↑ (en) A. D. King, Inertial Navigation – Forty Years of Evolution [PDF], iMAR Navigation.
Voir aussi
Articles connexes
- Navigation inertielle
- Guidage inertiel
- Navigation à l'estime
- Navigation maritime
- Accéléromètre
- Gyrocompas
- Gyromètre
- Gyromètre à fibre optique
- Gyrolaser