Un système de positionnement par satellites[Note 1] également désigné sous le sigle GNSS (pour Géolocalisation et Navigation par un Système de Satellites[1],[Note 2]) est un ensemble de composants reposant sur une constellation de satellites artificiels permettant de fournir à un utilisateur par l’intermédiaire d'un récepteur portable de petite taille sa position 3D, sa vitesse 3D et l'heure. Cette catégorie de système de géopositionnement se caractérise par une précision métrique, sa couverture mondiale et la compacité des terminaux, mais également par sa sensibilité aux obstacles présents entre le terminal récepteur et les satellites. Certains systèmes d'augmentation et de fiabilisation de portée régionale ou mondiales, gratuits ou payants, permettent de fiabiliser le système et d'améliorer les performances (DGPS, EGNOS, Assisted GPS (A-GNSS), etc.).
Le premier système de positionnement par satellites est développé par les États-Unis avec TRANSIT à usage uniquement militaire en 1964 puis avec le Global Positioning System (GPS), devenu opérationnel en 1995, qui fixe les principes de fonctionnement repris par les systèmes de navigation par satellites développés par d'autres pays. Le système GPS repose sur une constellation d'une trentaine de satellites qui permet à un utilisateur, situé sur n'importe quel point du globe, d'avoir toujours au minimum quatre satellites à portée, dans l'hypothèse d'un environnement dégagé (« clear sky »). Le terminal de l'utilisateur calcule sa position grâce au signal émis par chacun des satellites. À ce stade, la communication est mono-directionnelle, c'est-à-dire qu'il n'y a pas d'émission de signaux du terminal vers les satellites, ce qui implique que le système ne reçoit aucune information de la part de l'utilisateur. Celui-ci est donc le seul à connaître sa position calculée.
L'URSS, à la suite des États-Unis, développe GLONASS entré en fonction en 1996 et qui, après une période d'éclipse liée à l'éclatement de l'Union soviétique, est redevenu opérationnel en 2010. L’Union européenne avec le système Galileo et la Chine avec le système Beidou-2 (COMPASS) développent leur propre système qui est devenu opérationnel en 2012 et mettent en orbite Beidou-3 en 2020. Le Japon (QZSS) et l’Inde avec l'IRNSS développent de leur côté un système assurant une couverture uniquement régionale dont la Chine dispose également avec Beidou-1 depuis 2003.
Après une exploitation purement militaire par les États-Unis, l'utilisation des terminaux GPS (et plus généralement GNSS) s'est généralisée pour répondre aux besoins des professionnels et du grand public (navigation — maritime, aérienne, terrestre —, topographie, géodésie, génie civil, agriculture, synchronisation du temps, etc.) Les terminaux permettent souvent d'exploiter les signaux de plusieurs systèmes, dont fréquemment GLONASS, GPS et Beidou, augmentant de ce fait les performances de positionnement grâce à la redondance des satellites. Les terminaux, qui sont des systèmes passifs, peuvent être complétés par des émetteurs de radiolocalisation pour des applications de suivi logistique (APRS), de sauvetage (SAR), de surveillance de trafic maritime (AIS), d’étude océanographique, de biologie (radiotracking), etc. Cette retransmission de la position du terminal par télécommunication est également largement généralisée aux smartphones qui sont aujourd'hui tous munis d'un récepteur GNSS et dont de multiples applications exploitent la position de l'utilisateur. Cette fonction de suivi, ou tracking, est souvent attribuée à tort au système GNSS lui-même alors qu'il n'y est pour rien.
Principes de fonctionnement
Un système de positionnement par satellites fournit à son utilisateur via un récepteur dit GPS [Note 3](smartphone équipé d'une puce électronique spécialisée ou récepteur GPS spécialisé)[2] :
- les coordonnées géographiques en trois dimensions : longitude, latitude, altitude
- la vitesse de déplacement de l'utilisateur
- la date et heure.
Ces informations sont calculées à partir des mesures de distance à un instant donné entre le récepteur de l'utilisateur et plusieurs satellites artificiels spécialisés (les satellites de navigation) dont les positions dans l'espace sont connues avec précision :
- Chaque satellite émet en permanence un signal qui peut être reçu par tout récepteur situé dans le cône de visibilité du satellite.
- Chaque satellite inclut dans son signal les informations donnant sa position précise dans l'espace et la date/heure de l'émission du message.
- Pour optimiser le système, les satellites de navigation circulent sur une orbite moyenne à une altitude d'environ 20000 kilomètres. Compte tenu de cette donnée et de la nécessité que le récepteur puisse en permanence avoir quatre satellites visibles au-dessus de l'horizon, un système de navigation (GPS, Galileo, Beidou, Glonass) doit comporter environ 25 satellites de navigation opérationnels pour fournir une position, quelle que soit la position de l'utilisateur à la surface de la Terre.
En combinant la mesure simultanée de la distance d'au moins quatre satellites, le récepteur est capable par multilatération de fournir la position et l'altitude avec une précision de l'ordre du mètre, la vitesse avec une précision de quelques cm/s et le temps avec une précision de l'ordre de la nanoseconde. La précision dépend de très nombreux facteurs, dont la qualité du récepteur, le mode de calcul et l'environnement proche. En termes de position, elle peut descendre à quelques millimètres pour un récepteur conçu pour une utilisation en géodésie utilisant la phase des signaux jusqu'à plusieurs dizaines, voire centaines de mètres pour un récepteur bas de gamme en environnement urbain dense. Le récepteur peut être au sol ou embarqué positionné dans un véhicule en déplacement : automobile, navire, avion.
Détermination de la trajectoire du satellite
Pour mesurer la distance entre le récepteur et le satellite, la trajectoire précise de ce dernier doit être connue. Celle-ci est reconstituée à partir de deux types de messages envoyés par le satellite au récepteur :
- les données d'almanach sont transmises en permanence et fournissent la position approximative (de l'ordre du kilomètre) des satellites de navigation dans le ciel. Les orbites des satellites peuvent être déterminées avec ce niveau de précision plusieurs semaines voire plusieurs mois à l'avance car les perturbations qui l'affectent sont très réduites. Aussi l'almanach une fois chargé dans le récepteur n'a plus besoin d'être actualisé. L'almanach est utilisé par le récepteur pour identifier rapidement les satellites visibles depuis la position de son utilisateur :
- les données d'éphémérides fournissent des données de position beaucoup plus précises qui sont actualisées périodiquement (toutes les 4 à 6 heures pour le système) afin de tenir compte des plus petits changements affectant l'orbite des satellites. Ce sont ces données qui sont utilisées pour le calcul de la position.
Détermination de l'heure
Pour déterminer la distance entre le satellite et le récepteur, connaissant les paramètres de la trajectoire que suit le satellite, il faut théoriquement que l'heure des satellites et du récepteur soit identique. La précision de cette synchronisation est vitale. En effet, compte tenu de la vitesse à laquelle circule le satellite (plusieurs kilomètres par seconde), une désynchronisation de 10 millisecondes entre l'horloge du satellite et celle du récepteur engendre une erreur de calcul de la position de 300 m. A bord du satellite la précision et la stabilité de l'heure du satellite est garantie par l'emport de plusieurs horloges atomiques qui fournissent une heure qui ne dérive que de quelques nanosecondes par jour. Le récepteur, par contre, ne peut pas être équipé d'une horloge aussi précise pour des raisons de coût et d'encombrement (il existe des récepteurs équipés d'horloge atomique mais leur cout et leur encombrement les réserve à des usages très particuliers). L'heure est fournie par un oscillateur à quartz dont la dérive journalière moyenne est de 10 millisecondes. Pour contourner ce problème lors du calcul de la position, le décalage entre le temps du récepteur et le temps des satellites est traité comme une inconnue et calculé en même temps que les coordonnées du récepteur.
Calcul de la position
Pour déterminer sa position, sa vitesse et l'heure, le récepteur calcule la distance à laquelle se trouve le satellite à partir des données de l'éphéméride (formule permettant de calculer la trajectoire du satellite) et l'heure d'émission du signal fournis par le satellite et en se basant sur son horloge interne pour déterminer son heure de réception.
Le signal voyage à la vitesse de la lumière C≈300 0000 km / s. La distance D entre le récepteur et un satellite est égale à : D = C x (Heure de réception – Heure d’émission).
Mais ce calcul est entaché d'erreurs - on parle de pseudo-distance - du fait principalement de la désynchronisation des horloges mais également parce que différents phénomènes physiques viennent perturber la propagation du signal. Les principales sources d'erreur sont les suivantes :
- l'horloge du récepteur n'est pas synchronisée avec celle du satellite
- l'éphéméride envoyé par le satellite n'est pas parfaitement exact ;
- malgré la dérive très faible l'horloge atomique du satellite; l'heure fournie par celle-ci est entachée d'une légère erreur ;
- le signal est ralenti de manière variable durant sa traversée de l'atmosphère (ionosphère et troposphère) ;
- le signal peut être réfléchi par des objets au sol (bâtiments) avant d'atteindre le récepteur, on parle alors de « multi-trajets » ;
- enfin en milieu urbain, en montagne ou dans une région boisée le signal peut être bloqué.
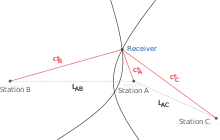
La méthode de trilatération permet théoriquement de calculer position, vitesse et temps en utilisant le signal de trois satellites : la distance à laquelle se situe un satellite positionne l'utilisateur à la surface d'une sphère dont le centre est le satellite. L'intersection de 3 sphères permet d'identifier un point unique dans l'espace. Un quatrième satellite au minimum est néanmoins requis pour permettre de déterminer le décalage des horloges (cf schéma ci-contre) et réduire les incertitudes liées aux autres sources de perturbation du signal, on parle alors de multilatération. Dans la réalité, le récepteur utilise le maximum de satellites dont il reçoit correctement le signal et calcule la solution qui lui semble « optimale », c'est-à-dire la plus vraisemblable compte tenu des erreurs estimées sur chaque pseudo-distance.
Système d'augmentation
Pour améliorer la précision de la position calculée et garantir des performances minimales associées à un certain facteur de risque (notion d’intégrité), le récepteur peut utiliser des signaux radio supplémentaires émis par des systèmes dits d'augmentation. Ces signaux sont émis par des satellites (généralement en orbite géostationnaire) ou des balises terrestres fixes.
Interface avec des applications
Le récepteur GNSS strictement dit, dont la seule fonction est de calculer la position et la vitesse, est souvent couplé à d'autres composants (calculateur, écran…) qui fournissent à l'utilisateur des fonctions de navigation, par exemple la détermination de la route à suivre pour rejoindre un point de coordonnées connues ou le calcul du trajet routier optimal pour se rendre d'un point A à un point B, avec la fourniture des indications nécessaires au conducteur à chaque endroit stratégique. Le récepteur peut également (principalement en navigation aérienne) être interfacé à d'autres moyens de navigation : centrale inertielle, autres senseurs de bord (compas, tachymètre, autres systèmes de radionavigation…) pour augmenter ses performances et la disponibilité de la position finale.
Dans le cas du suivi de flotte, le récepteur peut aussi être couplé à un moyen de télécommunication : téléphone cellulaire ou satellitaire, liaison UHF ou VHF, qui retransmet automatiquement la position du mobile à un central. Ce central peut alors contrôler, gérer ou surveiller le déplacement des mobiles.
Enfin, dans le contexte de l'Internet mobile, c'est-à-dire de la géolocalisation sur smartphones, les applications faisant usage du positionnement satellitaire sont absolument innombrables et se caractérisent toutes par le couplage du positionnement avec la communication cellulaire, c'est-à-dire généralement par une remontée des positions aux serveurs des applications.
Historique
Les systèmes de radionavigation terrestres
Les systèmes satellitaires ont été précédés par les systèmes terrestres de radionavigation, comme le DECCA, le LORAN (LOng RAnge Navigation) et l’Oméga, qui utilisaient des émetteurs terrestres et non des satellites. Certains de ces systèmes sont encore opérationnels, particulièrement en aéronautique, en raison de leur fiabilité et de leur précision locale, comme le VOR (VHF Omnidirectional Range), le DME, le TACAN (TACtical Air Navigation), l’ILS ou l’ADF. Tous ces systèmes reposent sur un réseau de stations terrestres qui émettent un signal radio. En analysant le signal de plusieurs stations émettrices, le système de radionavigation détermine la position. Ces systèmes présentent les inconvénients suivants :
- une couverture très partielle. Chaque station a une portée limitée du fait de la rotondité de la Terre et de l’affaiblissement du signal. Il faut disposer d'un réseau dense de stations. Pour des raisons financières et techniques (océans) la couverture se limite aux régions continentales ou proches des côtes où le nombre d'utilisateurs est suffisamment important ;
- une précision réduite lorsqu'on s'éloigne des stations ou lorsque les conditions de propagation des ondes sont mauvaises.
Les systèmes de navigation par satellites utilisant l'effet Doppler
Le système américain TRANSIT
Le début de l'ère spatiale modifie la donne. Les États-Unis développent Transit, le premier système de positionnement par satellites. Celui-ci est développé pour la marine de guerre des États-Unis par le laboratoire Applied Physics Laboratory de l'université Johns-Hopkins en 1958. Il devient opérationnel en 1964. Le système Transit repose sur l'exploitation de l’effet Doppler de signaux radio émis par des satellites de petite taille (une cinquantaine de kilogrammes) circulant sur une orbite polaire et stabilisés par gradient de gravité. La constellation de satellites Transit compte quatre satellites dans sa configuration opérationnelle. Une fois un des satellites en vue, soit en général après une attente de l'ordre de l'heure, le récepteur Transit parvenait à calculer dans un délai d'une quinzaine de minutes la position avec une précision d'environ 200 mètres. Le système est développé initialement pour obtenir une frappe précise des missiles Polaris embarqués à bord des sous-marins nucléaires lanceurs d'engins américains. Dès 1967 son utilisation se généralise à bord des navires civils américains comme étrangers et une centaine de milliers de récepteurs Transit étaient en fonctionnement au début des années 1990[3].
Les systèmes soviétiques Tsiklon et Parous
Pour répondre aux besoins militaires l'Union soviétique développe à la même époque que les Transit un système baptisé Tsiklon reposant également sur l'analyse de l'effet Doppler affectant le signal radio transmis par une constellation de plusieurs satellites circulant sur une orbite basse. Le système est déclaré opérationnel en 1982 mais il est rapidement remplacé par le système Parous (Tsiklon-B), qui repose sur le même principe technique et permet d'obtenir une meilleure précision (environ 100 mètres)[4],[5].
Le GPS : premier système de navigation moderne
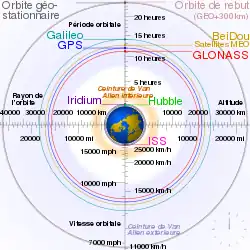
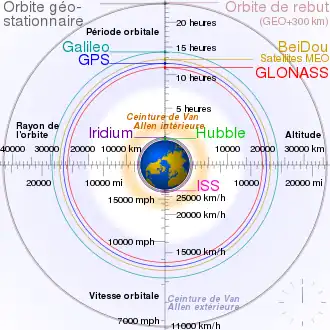
L'orbite de la Lune est environ 9 fois plus grande que l'orbite géostationnaire.[Note 5] Dans le fichier SVG, placez la souris sur une orbite ou son étiquette pour la mettre en évidence ; cliquez pour ouvrir l'article correspondant
{kind=link}
Au début des années 1970, les États-Unis décident de concevoir un système plus précis pour répondre à leurs besoins militaires. Les concepts du système GPS sont définis entre 1973 et 1978. Une première phase pré-opérationnelle est atteinte après les lancements de onze satellites dits du bloc I d'une durée de vie de 4,5 ans qui s'échelonnent entre 1978 et 1985. En 1983, le gouvernement américain décide que le système GPS sera ouvert aux civils dès qu'il deviendra opérationnel. Entre 1989 et 1997, 28 autres satellites aux durées de vie allongées en version II (7,5 ans) et IIr (10 ans) sont lancés. Le système est déclaré opérationnel en . Le signal est alors volontairement dégradé pour l'usage civil (précision de l'ordre de 100 mètres au lieu de 10 mètres) mais en 2000 le gouvernement américain décide de mettre fin à cette dégradation. Cela permit la navigation routière.
Développement des autres systèmes GNSS
Le système soviétique/russe Glonass
L'Union soviétique lance au début des années 1980 le développement d'un système analogue au GPS qui est baptisé GLONASS (globalnaïa navigatsionnaïa spoutnikovaïa sistéma, soit « système global de navigation satellitaire »). La mise au point et la maintenance du système est ralenti par la crise économique que traverse la Russie à compter du début des années 1990 : le système devient opérationnel en 1996 mais deux ans plus tard la Russie ne parvient plus à maintenir un nombre de satellites en orbite suffisant. Grâce à la reprise économique du début des années 2000 et à la priorité accordée par le pouvoir à la restauration de ce service, la fréquence de lancement des satellites est accélérée et le système redevient pleinement opérationnel en 2011[6]. L'iPhone 4S et le Samsung Wave III deviennent en 2011, les premiers smartphones grand public (en dehors du marché russe) à recevoir nativement les signaux GLONASS et à les utiliser pour évaluer le positionnement[7],[8].
Le système européen Galileo
Le projet Galileo, après une phase de définition technique débutée en 1999, est lancé le avec la signature d'un accord entre l'Union européenne et l'Agence spatiale européenne chargée du segment spatial. Une des motivations principales du projet est de mettre fin à la dépendance de l'Europe vis-à-vis du système américain, le GPS. Contrairement à celui-ci, Galileo est uniquement civil. Le projet parvient à surmonter l'opposition de certains membres de l'UE et d'une partie des décideurs américains ainsi que les difficultés de financement (le coût final est évalué à cinq milliards d'euros). Les tests de Galileo débutent fin 2005 grâce aux lancements des satellites précurseurs GIOVE-A et GIOVE-B en et . Les premiers satellites en configuration opérationnelle (FOC) sont lancés en . Au , 26 satellites ont été lancés, dont 22 sont opérationnels[9]. Les premiers services de Galileo sont opérationnels depuis le [10],[11].
Le système chinois Beidou
Le développement du système de positionnement par satellites chinois Beidou remonte au milieu des années 1980. Une première version du système, baptisée Beidou-1, comportant trois satellites, deux opérationnels plus un en secours, est déployée en 2000 et est déclarée opérationnelle en 2003. Ce système régional permettait de déterminer sa position uniquement en Chine et dans les régions avoisinantes avec une précision d'environ 100 mètres ou 20 mètres avec un système de transmissions bidirectionnelles. Un quatrième satellite de secours sera lancé en 2007. La deuxième génération du système, Beidou-2, débute en 2007, avec l'objectif de fournir une couverture mondiale avec une précision de 10 mètres dans sa version civile. Celle-ci est assurée par trois types de satellites : 5 satellites en orbite géostationnaire, trois en orbite géosynchrone inclinée (55°) et 27 en orbite moyenne. Beidou-2 est déclaré opérationnel fin 2012 avec une couverture comprenant la Chine et les pays alentour. Le vingtième et dernier élément Beidou-2 a été mis en orbite en 2019[12]. Les performances à terme de Beidou-2 sont alors comparables aux trois autres systèmes mondiaux opérationnels (GPS, GLONASS et Galileo). La génération Beidou-3, dont le déploiement débute en , est finalisée avec la mise en orbite du dernier satellite mis en orbite le [13]. La constellation comporte désormais trente-cinq satellites, dont trente opérationnels : 3 satellites en orbite géostationnaire, 3 en orbite géosynchrone inclinée à 55°, et 24 en orbite moyenne[14].
Fonctionnement technique détaillé
Signal radio et mesure de la distance
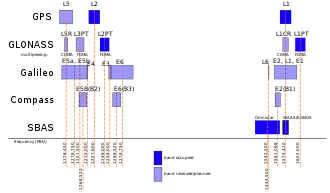
Le satellite de navigation émet un signal radio qui est exploité par le récepteur pour calculer sa position. Ce signal est émis dans une plage de fréquences radio réservée auprès des autorités mondiales de régulation des télécommunications. Le signal radio se situe en UHF dans la bande L autour de 1,5 gigaHertz plus élevée que les fréquences utilisées pour la diffusion de la radio et de la télévision mais moins élevée que celles utilisées par les radars. Chaque satellite émet dans trois fréquences qui sont propres à chaque système de navigation par satellites. Par exemple les satellites Galileo émettent les signaux radio L1 (dans la fréquence 1 575,42 MHz), E6 (1 278,75 MHz) et E5 (1 191,795 MHz).
Modulation des signaux
Pour transmettre les informations permettant au récepteur de calculer la position du satellite et sa propre position, l'émetteur radio module la phase de l'onde porteuse du signal radio. Le message d'origine qui est stocké sous forme binaire (suite de 0 et de 1) est transmis sous la forme de saut de phase. Le récepteur détecte ces sauts et reconstitue l'information sous forme binaire.
Codage des signaux (cas des systèmes GPS et Galileo)
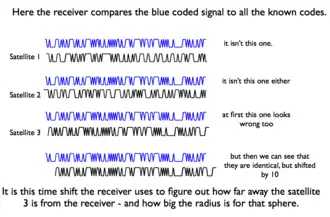
Le récepteur doit pouvoir identifier que les signaux radio reçus dans la fréquence sont en provenance des satellites de navigation et il doit pouvoir identifier chaque satellite. A cet effet les systèmes GPS et Galileo utilisent la technique du CDMA (Code Division Multiple Access en français accès multiple par division de code) : chaque satellite est caractérisé par un code (une suite de 0 et de 1) que les récepteurs savent identifier. Le code présente également l'avantage de permettre de développer des applications militaires (signal plus précis comme le PPS du système GPS) dont l'accès est restreint car le code n'est connu que par des récepteurs spécialisés (militaires). Les satellites du système GPS émettent deux types de code : le code dit C/A (Clear Acess) identifiable par tous les récepteurs est émis à la fréquence de 1 milliseconde (=il est répété 1000 fois par seconde) et le code dit P (Precision) réservé aux forces armées des Etats-Unis. De leur côté les satellites du système Galileo émettent trois types de code : un code en accès libre analogue au C/A américain, le code PRS (Public Regulated Service) réservé aux applications gouvernementales et militaires et le code CS (Commercial Service) réservé aux applications commerciales à accès payant[15].
Les signaux radio émis par les satellites de navigation des systèmes GPS et Galileo transmettent différents types de message : almanach (position approximative des satellites de la constellation utilisée pour un premier traitement des signaux reçus), éphémérides (position précise du satellite), correction d'horloge (retard ou avance de l'horloge du satellite par rapport au temps système) et paramètres de correction ionosphérique. Ces données sont transmises avec un débit très faible (50 bits par seconde pour le signal C/A du GPS et 125 bits par seconde pour Galileo) ce qui génère un délai de 12 minutes pour la réception de toutes ces informations par les satellites GPS et cinq minutes par les systèmes Galileo. Les messages sont numérisés (transformés en séquence de 0 et de 1) puis transmis en superposant les séquences binaires du code et celle du message. Par exemple pour le signal C/A des satellites GPS, un bit du message est transmis dans une itération sur 20 du code en inversant les 0 et les 1 si le message comporte un 1 et en ne modifiant pas le code si le message comporte un 0[16].
Les systèmes actuels sont plus directs pour l’utilisateur : le satellite transmet un signal contenant sa position et l’instant exact d’émission. Ce message est superposé au code qui contient la référence temporelle. La synchronisation des signaux est obtenue par des horloges atomiques à bord de chaque satellite.
Le récepteur compare l’instant d’arrivée vis-à-vis de son horloge propre, avec l’instant d’émission indiqué et mesure ainsi la distance du satellite. Ces mesures sont répétées sur tous les satellites visibles et permettent de calculer une position en continu.
Chaque mesure de distance, quel que soit le système utilisé (constellation basse ou géostationnaire ou balise locale) place le récepteur sur une sphère centrée sur l’émetteur. En utilisant au moins trois émetteurs, ces sphères ont un seul point d’intersection. Ce principe simple se complique cependant :
- l’horloge locale du récepteur est rarement de précision atomique, seules les différences de temps sont donc précises, ce qui demande quatre balises ou satellites pour faire un point au lieu de trois (si on connaît l’altitude, trois balises suffisent) ;
- les récepteurs sont mobiles, et les mesures sont donc effectuées en des points différents ;
- les ondes radio ont une vitesse légèrement variable selon les couches ionosphériques traversées.
Le récepteur intègre donc ces diverses erreurs, utilisant des corrections et des mesures de divers satellites ou balises, puis des techniques d’intégration et de filtrage comme les filtres de Kalman, pour obtenir le point le plus probable et sa précision estimée, sa vitesse ainsi que le temps universel.
Récepteurs
Le récepteur utilisé pour obtenir sa position à l'aide des systèmes de positionnement par satellites remplit quatre fonctions principales[17] :
- Réception des signaux
- Traitement des signaux
- Oscillateur local
- Calcul de la position.
Réception des signaux
Le signal radio est reçu par un ensemble qui comprend une antenne, un préamplificateur et un convertisseur. Généralement les antennes doivent pouvoir capter les signaux venant de n'importe quelle direction (antenne omnidirectionnelle) car la plupart des récepteurs sont mobiles. Le signal reçu est très faible (pas plus puissant que le bruit électromagnétique environnant) et il faut l'amplifier pour pouvoir le traiter (fonction de pré amplification). Un convertisseur diminue la fréquence (plus d'un milliard d'oscillations par seconde) pour permettre le traitement du signal[17].
Traitement des signaux
Le récepteur doit traiter en parallèle les signaux de plusieurs satellites. Chaque signal est traité par un canal distinct. Les récepteurs commercialisés en 2022 peuvent avoir plusieurs centaines de canaux[18].
Oscillateur local
Calcul de la position
Les différents systèmes de navigation par satellites
Cahier des charges
Les systèmes sont caractérisés par leurs performances pour les applications souhaitées, principalement :
Précision
La précision de la localisation dépend du nombre de satellites reçus et du temps d’intégration, ainsi que de la géométrie des mesures. Les récepteurs les plus simples permettent de localiser en quelques secondes un mobile avec une précision meilleure que 100 mètres. Les récepteurs sophistiqués tels que ceux embarqués sur les avions civils et militaires permettent une précision inférieure au décamètre, voire au mètre. Un récepteur fixe au sol permet, après une intégration sur une période de plusieurs minutes, de connaître la position d’un point avec une précision centimétrique.
La position est calculée par rapport au système géodésique World Geodetic System en 1984 WGS 84), mais les références cartographiques sont souvent basées sur des systèmes géodésiques plus anciens (WGS 72 ou antérieurs). L'écart entre ces systèmes cartographiques locaux et le système de référence (jusqu'à 500 m dans certaines îles océaniques) peut entraîner une erreur de positionnement supérieure à l'imprécision du système. Ces corrections doivent donc être introduites.
Intégrité
L'intégrité est le terme officiel de l'Organisation de l'aviation civile internationale (OACI) pour désigner la fiabilité du point fourni : une position utilisée en navigation au large, par exemple, peut être occasionnellement erronée (faible intégrité) sans conséquences graves, si le mobile possède des instruments autonomes, alors qu'une position utilisée pour un atterrissage sans visibilité doit au contraire avoir une intégrité absolue.
Couverture et disponibilité
Un système de positionnement par satellites peut avoir une couverture globale ou régionale, il peut être indisponible pendant des périodes plus ou moins longues, avoir des manques de satellites (par exemple GLONASS durant les années 2000). Le but des systèmes combinés comme les GNSS-1 et GNSS-2 est de pallier les défauts de chaque système individuel grâce à des combinaisons et compléments dits d'« augmentation ».
Principales spécificités des systèmes de navigation satellitaires existants ou en développement
Les systèmes de positionnement satellitaires avec une couverture globale sont :
- GPS pour les États-Unis (pleinement opérationnel depuis 1995) ;
- GLONASS pour la Russie (opérationnel entre 1996 et 1999, puis de nouveau opérationnel depuis 2010) ;
- Galileo pour l'Europe (opérationnel depuis 2016[19]) ;
- Compass ou Beidou-2 et 3 (évolution à dimension mondiale de Beidou-1, régional) pour la Chine.
Les systèmes de positionnement avec une couverture régionale :
- Beidou-1 pour la Chine ;
- IRNSS pour l'Inde;
- QZSS pour le Japon.
| Caractéristique | GPS | GLONASS | GALILEO | Beidou/Compass |
|---|---|---|---|---|
| Segment spatial | ||||
| Altitude | 20 200 km | 19 100 km | 23 222 km | 21 528 km |
| Inclinaison | 55° | 64,8° | 56° | 55° |
| Période orbitale | 11 h 58 | 11 h 15 | 14 h 7 | 12 h 53 |
| Nombre de plans orbitaux | 6 | 3 | 3 | 3 |
| Nombre de satellites opérationnels (en cible) | 31 (31) | 24 (24) | 22 (24) | 27[20] (+3 + 5) |
GPS
Le système GPS, se développe, à partir de 1978 (année de mise en service du premier satellite) et devient disponible librement en 1994 (avec un accès qui n'est alors plus réservé à l'armée américaine) et pleinement opérationnel en 1995 (avec une constellation de 24 satellites). Il est alors, pendant un an, le seul système de positionnement par satellite, pleinement efficace et fonctionnel.
Un an plus tard (1996), le système GLONASS russe devient, lui aussi, pleinement opérationnel. Cependant, entre 1999 et 2010 (à cause de l’obsolescence de GLONASS), le système GPS était redevenu le seul système mondial de navigation satellitaire entièrement opérationnel. En 2015, Il est constitué de 31 satellites[21] (24 à l'origine) en orbite intermédiaire (MEO) en six plans orbitaux. Le nombre exact de satellites varie en fonction des remplacements de satellites en fin de vie.
GLONASS
Le système de positionnement par satellites russe GLONASS repose sur la même architecture technique que le système américain GPS. Le segment spatial est constitué de 24 satellites circulant sur une orbite moyenne circulaire. Les satellites sont répartis sur trois plans orbitaux. Une des spécificités de Glonass par rapport aux autres systèmes de navigation par satellite est l'inclinaison orbitale élevée (64,8° contre 55/56° pour les systèmes GPS, Galileo et Beidou). Cette caractéristique permet une meilleure couverture des régions polaires qui représentent une fraction importante du territoire de la Russie
Galileo

Le segment spatial de Galileo sera constitué à terme de trente satellites dont six de rechange. Chaque satellite, d'une masse d'environ 700 kg, circule sur une orbite moyenne (23 222 km) dans trois plans orbitaux distincts ayant une inclinaison de 56°. Ces satellites émettent un signal qui leur est propre et retransmettent un signal de navigation fourni par le segment de contrôle de Galileo. Ce dernier est constitué de deux stations chargées également de surveiller l'orbite et l'état des satellites. Les signaux de navigation de Galileo sont compatibles avec ceux du GPS, permettant aux récepteurs de les combiner pour augmenter la précision ainsi que la véracité du point.
Beidou
En configuration opérationnelle, la constellation de satellites Beidou comprend 35 satellites : 5 satellites circulent sur une orbite géostationnaire, 3 sur une orbite géosynchrone inclinée et 27 satellites en orbite moyenne distribués sur 3 plans orbitaux. Par ailleurs, 3 satellites de rechange en orbite moyenne seront pré-positionnés.
IRNSS
Le système IRNSS (Indian Regional Navigational Satellite System) est un projet de système autonome de navigation régionale construit et contrôlé par le gouvernement indien. Il doit permettre une précision absolue de 20 mètres sur l’Inde et s'étendrait jusqu’à 1 500 à 2 000 km autour de son voisinage. Le but est d'avoir un système entièrement sous contrôle indien, le segment spatial, terrestre et les récepteurs étant développés par l’Inde.
Le projet a été approuvé par le gouvernement indien en , avec un objectif de développement en six à sept ans.
QZSS
Le système QZSS (Quasi-Zenith Satellite System), est développé par le Japon pour un premier lancement en 2008. Il est constitué de trois satellites géostationnaires permettant le transfert de temps et une augmentation du GPS. Il couvrira le Japon et sa région[22]
Autres systèmes de positionnement satellitaires
Le système français Doppler Orbitography and Radiopositioning Integrated by Satellite (DORIS) peut être considéré comme l’inverse des GNSS : à partir de balises au sol, il permet de déterminer avec précision la position d’un satellite. Il est utilisé par exemple sur les satellites d’observation[23]
Les systèmes Argos et Cospas-Sarsat ne sont pas à proprement parler des systèmes de navigation, mais de positionnement à distance : le mobile ne contient qu'un émetteur, et la position est connue par le centre de calcul du système. Quoique de précision médiocre (1 à 2 km), ils sont utilisés pour la sécurité aérienne et maritime ou le radiotracking d'animaux, grâce à la simplicité des balises embarquées. Ils fonctionnent, comme le TRANSIT, par mesure d'effet Doppler.
Classification des GNSS par l'Organisation mondiale de l'aviation civile
Les systèmes de positionnement par satellites capables de fournir une précision et une intégrité compatible avec les exigences de la navigation aéronautique civile sont définis ainsi par l'OACI[24] :
GNSS-1
Le GNSS-1 est la première génération de système de positionnement par satellites, combinant l’utilisation des systèmes GPS et GLONASS, avec des systèmes d’augmentation satellitaires (SBAS) ou terrestres (GBAS). Aux États-Unis, le complément satellitaire est le WAAS, en Europe, c’est EGNOS, et au Japon, le MSAS. Les systèmes complémentaires terrestres (GBAS) sont généralement locaux, comme le Local Area Augmentation System (LAAS). Les performances du GNSS1 sont compatibles avec la navigation « en route » (suivi des couloirs aériens et des espacements) et éventuellement d’approche si un système LAAS est disponible.
GNSS-2
Le GNSS-2 est la seconde génération de systèmes, capable de fournir tous les services civils, dont l’exemple le plus avancé est le Galileo européen. Ces systèmes procureront simultanément la précision et l’intégrité nécessaire à la navigation civile dans toutes les phases de vol.
Le système GPS en développement doit inclure également la porteuse L5 d’intégrité, le mettant ainsi au niveau GNSS2.
- Les systèmes de base sont les constellations opérationnelles existantes ou en déploiement : GPS, Galileo et GLONASS.
- Les systèmes d’augmentation satellitaires globaux : Omnistar et StarFire.
- Les systèmes d’augmentation satellitaires régionaux (SBAS) incluent le WAAS américain, l’EGNOS européen, le MSAS japonais, et le GAGAN indien.
- Les systèmes de navigation satellitaires régionaux tels que le QZSS japonais, le IRNSS indien et le Beidou chinois.
- Les systèmes d’augmentation terrestres continentaux (GBAS) par exemple l’australien GRAS et le service DGPS du ministère des transports américain.
- Les GBAS régionaux comme le réseau CORS (Continuously Operating Reference Station).
- Les GBAS locaux utilisant une seule station de référence fonctionnant en corrections cinématiques. (Real Time Kinematic).
Les systèmes d'augmentation de performances
Pour les applications demandant une sécurité absolue du point (atterrissage sans visibilité, anti-collision…) les signaux de navigation sont complétés par un signal dit d’« intégrité » qui permet d’éliminer toute mesure issue d’un émetteur en défaut temporaire ou prolongé. Ce signal d'intégrité est, dans le cas des GNSS actuels, fourni par un système d'augmentation qui surveille en temps réel la santé des satellites, tel le système satellitaire européen EGNOS qui a été développé spécifiquement pour l'aviation civile, mais qui peut, sous certaines conditions, rendre aussi des services en navigation maritime ou terrestre.
Les systèmes de positionnement par satellites peuvent être complétés par des systèmes dits d'« augmentation » ou d'« overlay » qui délivrent en temps réel des corrections permettant d'accroître la précision ainsi que des informations garantissant l'intégrité de ces corrections. Le principe de ces systèmes est qu'une ou plusieurs stations au sol mesurent en permanence l'erreur et transmettent un signal de correction aux utilisateurs.
Il existe de nombreux systèmes différents selon les corrections fournies au récepteur. Certains systèmes transmettent des informations sur les sources d’erreur (écarts d’horloge, éphémérides, retards ionosphériques), d’autres fournissent l’écart constaté total (différentiel), d’autres ajoutent des informations issus du véhicule lui-même (vitesse, altitude…).
On classe généralement ces systèmes d'augmentation en trois catégories, selon la manière dont la correction est calculée et transmise :
Augmentation basée sur des satellites (SBAS)
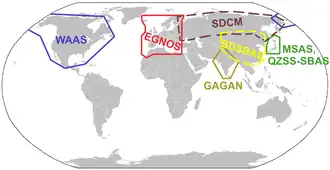
L'augmentation basée sur des satellites (SBAS : Satellite-Based Augmentation System) est un système couvrant un périmètre régional (continent ou pays) qui calcule et diffuse des corrections pour les différentes sources d'erreur affectant les positions transmises par les satellites GPS : écarts sur l'heure, la position du satellite et l'impact de l'ionosphère. Les SBAS permettent d'améliorer la précision de la position fournie par les systèmes GPS en la portant à 1 ou 2 mètres. Il repose sur des stations terriennes qui déterminent ces erreurs en mesurant l'écart entre la position fournie par les satellites GPS et leur position réelle. Des corrections sont alors calculées en temps réel et renvoyées à des satellites géostationnaires qui les diffusent vers les récepteurs GPS équipés pour recevoir ces messages. Les systèmes SBAS, conçus initialement principalement pour le transport aérien, sont désormais utilisés dans de nombreux secteurs du transport : navires, trains, camions, engins agricoles. Différents systèmes SBAS répondant à des normes internationales, ont été développés ou sont en cours de développement dans les différentes régions du monde :
- WAAS (Wide Area Augmentation System) est le système d'augmentation utilisé pour l'Amérique du Nord. Il est développé par l'Administration fédérale de l'aviation des Etats-Unis et est devenu en 2003 le premier système SBAS opérationnel. Une quarantaine de stations, réparties sur ce territoire des Etats-Unis, détermine les erreurs de calcul des satellites GPS et transmet les corrections à appliquer à des satellites géostationnaires qui sont chargés de les diffuser vers les récepteurs GPS. Il s'agit de satellites de télécommunications commerciaux (en 2020 : Eutelsat 117 Ouest B, SES-15 et Galaxy 30).
- EGNOS (European Geostationary Navigation Overlay Service) est le système couvrant l'Europe et l'Afrique du Nord. Ce système financé par l'Union Européenne a été développé par l'Agence spatiale européenne[25].
- MSAS (MTSAT Satellite Augmentation System) au Japon ;
- GAGAN (GPS Aided GEO Augmented Navigation) en Inde, complétant le GPS ;
- SDCM (System for Differential Corrections and Monitoring) pour la Russie, complétant le GPS et GLONASS. Ce système permet de corriger la position de satellites GPS et Glonass n'était pas opérationnel en 2021. Il repose sur une vingtaine de stations qui détermine les erreurs de calcul des satellites et renvoie les corrections à appliquer aux satellites géostationnaires qui les diffuse vers les récepteurs ;
- BDSBAS (BeiDou Satellite-Based Augmentation System) pour la Chine en cours de développement en 2021.
- K-SBAS (Korea Augmentation Satellite System) pour la Corée du Sud en cours de développement en 2021.
- SouthPAN (Southern Positioning Augmentation Network) pour l'Australie et la Nouvelle-Zélande en cours de dévelooement en 2021.
Augmentation basée sur des systèmes sol (GBAS)
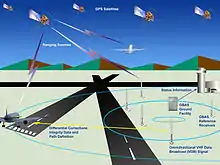
L'augmentation basée sur des systèmes sol GBAS repose sur des corrections calculées et transmises par des équipements terrestres. Dans un aéroport, des récepteurs GPS locaux de référence envoient des données à un système central. Ces données sont utilisées pour former un message de correction, qui est alors transmis automatiquement aux utilisateurs (avions) par l'intermédiaire d'une liaison de transmission de données VHF. Un récepteur embarqué dans l'avion utilise cette information pour corriger les signaux GPS, et peut alors fournir un affichage standard ILS qui est utilisé pour réaliser une approche de précision de la piste d'atterrissage.
Augmentation basée sur des systèmes à bord (pour les avions) ABAS
Augmentation basée sur des systèmes à bord (pour les avions) ABAS (Aircraft Based Augmentation System
- Centrales à inertie ;
- Exploitation de la redondance des mesures GPS (algorithmes RAIM/FDE pour Receiver Autonomous Integrity Monitoring (en) / Fault Detection and Exclusion) ;
- Aide barométrique.
Ces systèmes permettent d'obtenir une précision allant jusqu'au centimètre. Pour la navigation aérienne, l'OACI demande que l'intégrité des systèmes de navigation par satellite soit surveillée, et qu'une alerte soit émise à bord en cas de perte de l'intégrité nécessaire (qui dépend de la phase du vol).
Applications
Un usage initial militaire

Les systèmes de navigation satellitaires ont été développés d’abord pour répondre aux besoins des militaires. Ils permettent en effet une précision inégalée dans le guidage des missiles jusqu'à leur but, augmentant leur efficacité et réduisant les risques de dégâts collatéraux. Ces systèmes permettent également aux forces terrestres de se positionner avec précision, réduisant les incertitudes tactiques, aux marines et aux forces aériennes de naviguer avec précision, indépendamment de tout support au sol.

Ainsi, les satellites de navigation agissent en multiplicateur de puissance militaire et dans les conflits très médiatisés, réduisent les retentissements des pertes civiles. Toute nation ayant des ambitions militaires souhaite donc se doter de ces systèmes.
La possibilité de distribuer des signaux de radionavigation inclut également la possibilité de les interdire d’emploi sur certaines zones sans une clé de décryptage. Le signal civil du GPS était muni jusqu’en 1990 d’un code d’étalement aléatoire de précision, pour éviter son emploi militaire (« selective availability »), qui réduisait la précision à 100 m au lieu des 10 m actuels.
Usages civils

Le marché des GNSS est largement dominé par les applications civiles, principalement les applications grand public (les smartphones et tablettes, et ultérieurement les objets connectés en général) et le transport routier, qui se partagent plus de 90 % du marché. L'agriculture et la géomatique se partagent la moitié du segment restant devant les drones et la navigation maritime[26].
Les usages civils des systèmes de positionnement par satellites sont multiples :
- la navigation, depuis les récepteurs portables de randonnée, les navigateurs de véhicules, jusqu’aux centrales de navigation des aéronefs et navires ;
- le transfert de temps et la synchronisation, scientifique ou pour les télécommunications ;
- la surveillance, en liaison avec un émetteur APRS ;
- la topographie, en constructions ou travaux publics ;
- le sauvetage aéronautique ou maritime (Search and rescue), en liaison avec une balise-émetteur de détresses ;
- la géophysique, par exemple la surveillance des failles ;
- le suivi des animaux migrateurs ou des populations d'espèces menacées, par radiotracking ;
- la gestion de réseaux de transport, bus, remorques, etc. ;
- la surveillance des zones de pêche ;
- l'agriculture de précision, par exemple en permettant les épandages sans recouvrement ;
- la gestion des collectivités locales, par la mise à jour du cadastre ;
- la lutte contre le vol, en particulier des véhicules ou des containers ;
- la lutte contre la piraterie maritime ;
- etc.
Enjeux économiques et politiques
Au cours de l'année 2021, le nombre de récepteurs GPS commercialisé est estimé à 1,8 milliard et selon un rapport de l'Union européenne ce nombre devrait être porté à 3,1 milliards en 2031. À cette date la parc total des récepteurs devrait atteindre 10 milliards. Il s'agit en majorité de téléphones mobiles équipés de composants électroniques permettant de traiter le signal des satellites de navigation[27]. Le taux d'équipement en 2014 était de 1,4 terminal par personne en Amérique du Nord (2,5 en 2023), 1,1 en Europe (2,1 en 2023), 0,8 en Russie (2,3 en 2023), 0,5 en Amérique du Sud (1,1 en 2023), 0,4 en Asie (1 en 2023) et 0,2 en Afrique (0,8 en 2023). Une majorité de terminaux a désormais la capacité d'exploiter le signal des satellites de plusieurs systèmes de positionnement : 23 % peuvent utiliser les signaux GPS et GLONASS, 8 % les signaux GPS, GALILEO et GLONASS et 21 % les signaux des quatre systèmes de positionnement ayant une couverture mondiale (GPS, GALILEO, BEIDOU et GLONASS)[28].
Les systèmes de positionnement par satellites ont plusieurs répercussions économiques :
- leur construction et leur entretien (remplacement des satellites…) nécessitent d'importantes dépenses budgétaires. La fédération de Russie avait laissé se dégrader le système GLONASS pour des raisons budgétaires, avant le rétablissement de la couverture en 2010. L'Union européenne s'est unie pour Galileo, mais les décisions budgétaires difficiles ont retardé le programme ;
- les entreprises sont choisies pour construire le segment spatial après de fortes luttes d'influence politiques ;
- le marché des applications, en matériel et logiciel est en expansion, mais ne peut contribuer au budget d'un système nouveau, le système existant GPS étant d'usage gratuit ;
- les économies réalisées sur les systèmes terrestres anciens permettent de compenser en partie les coûts. Par exemple, le développement complet du GNSS2 doit permettre d'éliminer une partie des moyens de radionavigation aéronautiques actuels (VOR, ILS, DME, ADF) ;
- la navigation plus précise permet des économies sur les coûts de carburant, et le désengorgement des couloirs aériens et des terminaux par réduction des intervalles.
Pour arriver à ce but, les États cherchent une indépendance vis-à-vis du GPS des États-Unis, afin de développer des applications civiles ou militaires nationales. Le développement d'un système de navigation satellitaire est également un élément de prestige pour les nouvelles nations spatiales (Chine et Inde). Dans cette même optique, la Commission européenne a apporté son soutien à la création du Master GNSS[29] par l'École nationale de l'aviation civile et l'Institut supérieur de l'aéronautique et de l'espace.
GPS et protection des données personnelles
La pratique croissante de la géolocalisation d'individus ou de véhicules, d'objets connectés (smartphones et tablettes notamment) ou d'opérations effectuées par des individus (sur un ordinateur en consultant internet ou sur de nombreux terminaux fixe ou mobile de paiement par carte, de distribution d'argent liquide, bornes de contrôle de passage, etc.) est source de stockage d'une grande quantité de données personnelles relatives à la position et aux déplacement des personnes, qui s'ils sont mal sécurisés peuvent poser des problèmes de protection de la vie privée.
La production de tels fichiers ou le suivi de véhicules ou de personnes par géolocalisation GSM/GPS sont des « traitements de données à caractère personnel », qui nécessitent en France une autorisation ou une déclaration à la CNIL (« qui vérifiera que les principes relatifs à la protection de données à caractère personnel sont bien respectés ». La non déclaration de traitement de ce type de données par l'employeur est une faute grave « punie de cinq ans d'emprisonnement et de 300 000 euros d'amende[30]. » Il existe une différence dans le cas du suivi de véhicule entre un véhicule de société (qui n'est utilisé théoriquement que durant les heures de travail) ou de fonction (qui est un avantage en nature).
Notes et références
Notes
- ↑ Désignation complète : « système de positionnement et de datation par satellites ».
- ↑ Francisation de l'anglais global navigation satellite system.
- ↑ Par abus de langage, il est souvent fait référence au GPS pour désigner le système de positionnement par satellites alors que la plupart des appareils utilisent simultanément systèmes de positionnement (GPS, Glonass, Galileo,...)
- ↑ Les périodes et vitesses orbitales sont calculées à partir des relations 4π2R3 = T2GM et V2R = GM, où : R est le rayon de l'orbite en mètres ; T est la période orbitale en secondes ; V est la vitesse orbitale en m/s ; G est la constante gravitationnelle, environ 6,673 × 10−11 Nm2/kg2 ; M est la masse terrestre de la Terre, environ 5,98×1024 kg (1,318×1025 lb).
- ↑ Approximativement 8,6 fois (en rayon et en longueur) lorsque la Lune est au plus près (c'est-à-dire 363 104 km42 164 km), à 9,6 fois lorsque la Lune est au plus loin (c'est-à-dire 405 696 km42 164 km).
Références
- ↑ « JORF n°25 du 30 janvier 2005, p. 1625 - texte n° 43 - Vocabulaire des sciences et techniques spatiales (liste de termes, expressions et définitions adoptés) », sur legifrance.gouv.fr, (consulté le ).
- ↑ « Smartphones - Géolocalisation plus précise avec Galileo - Actualité - UFC-Que Choisir », sur quechoisir.org, (consulté le ).
- ↑ (en) Robert J Danchik, « An Overview of Transit Development », Johns Hopkins APL Technical Digest, Applied Physics Laboratory (université Johns-Hopkins), vol. 19, no 1, , p. 18-26 (lire en ligne)
- ↑ (en) Mark Wade, « Tsiklon » (consulté le )
- ↑ (en) Mark Wade, « Tsikada » (consulté le )
- ↑ Pierre Bosser, GNSS : systèmes globaux de positionnement par satellite, ENSG, , 113 p. (OCLC 936975932, cours-fad-public.ensg.eu/pluginfile.php/1501/mod_resource/content/1/gnss.pdf), p. 73-77
- ↑ (en) India signs GLONASS agreement, rin.org.uk.
- ↑ (en) India, Russia Agree On Joint Development Of Future Glonas Navigation System, spacedaily.com.
- ↑ (en) « Constellation Information », sur Agence du GNSS européen (consulté le ).
- ↑ (en) « Galileo navigation satellite system goes live », sur Deutsche Welle, (consulté le ).
- ↑ « Top départ pour Galileo, le « GPS européen » », L'Obs, (lire en ligne, consulté le ).
- ↑ « La Chine déploie son dernier satellite de positionnement BeiDou 2 », sur www.air-cosmos.com, .
- ↑ « Beidou, le «GPS chinois», couvre maintenant le monde entier », sur www.lavoixdunord.fr, .
- ↑ « La Chine finalise son système de positionnement par satellite », sur www.air-cosmos.com, .
- ↑ GPS et Galileo - systèmes de navigation par satellites, p. 16-17
- ↑ GPS et Galileo - systèmes de navigation par satellites, p. 20-23
- ↑ GPS et Galileo - systèmes de navigation par satellites, p. 46-47
- ↑ (en) FAQ – GALILEO, the EU's satellite navigation programme - Commission européenne, .
- ↑ (en) BeiDou Satellites mgex.igs.org, consulté en .
- ↑ (en) GPS Constellation Status - US Coast guards.
- ↑ (en) « Japan Seeking 13 Percent Budget Hike for Space Activities », sur Space.com, .
- ↑ (mul) AVISO+ - Cnes/CLS.
- ↑ (en) « A Beginner’s Guide to GNSS in Europe » [PDF], IFATCA.
- ↑ (en) « About EGNOS », sur Egnos User Support, European Satellite Services Provider (consulté le )
- ↑ (en) GSA GNSS market report[PDF], gsa.europa.eu.
- ↑ EUSPA, EUSPA EO and GNSS Market Report 2022, Union européenne, , 216 p. (lire en ligne).
- ↑ (en) « GNSS Market report issue 4 » [PDF], European Global Navigation Satellite Systems Agency, , p. 8 et 15.
- ↑ Création du Master GNSS - AéroBuzz, .
- ↑ Article 226-16 du code pénal - Légifrance.
Voir aussi
Bibliographie
- Cours ou ouvrages en ligne
- Jean Marc Pieplu, GPS et Galileo : systèmes de navigation par satellites, Paris, Eyrolles, , 163 p. (ISBN 978-2-212-11947-3, OCLC 421525857, BNF 40228632, lire en ligne).
- Pierre Bosser, GNSS : systèmes globaux de positionnement par satellite, ENSG, , 113 p. (OCLC 936975932, cours-fad-public.ensg.eu/pluginfile.php/1501/mod_resource/content/1/gnss.pdf)Support de cours de l'École nationale des sciences géographiques.
- EUSPA, EUSPA EO and GNSS Market Report 2022, Union européenne, , 216 p. (lire en ligne)Rapport sur le marché de l'imagerie et du positionnement satellitaire.
Articles connexes
- Récepteur GPS
- Application du GPS en météorologie
- Radionavigation
- Navigation de surface
- Global Positioning System
- GPX (format de fichier)
- Géolocalisation
- GPS week number rollover
Liens externes
- « GPS : vous êtes arrivés à destination », Eurêka !, France Culture, 21 juillet 2022.
- (en) Navipedia - European Space Agency (ESA)
- Glossaire des termes relatifs aux systèmes de positionnement par satellite[PDF]
- Les systèmes de positionnement par satellite - Site personnel d'Erwin Mayer et Maxime Chipault
- Guide EGNOS (système d'augmentation du signal GPS)[PDF] - CNES/ESA,
- Géopositionnement GNSS, principe et applications - Éric Calais, École normale supérieure
- European GNSS Agency