La direction d'une automobile, ou d'un véhicule routier en général, est l'ensemble des organes qui permet de modifier l'orientation de sa trajectoire et donc de prendre des virages.
Dans un véhicule à roues, le conducteur fait varier l'angle de dérive (angle entre le plan de roue et la trajectoire de la roue) des roues directrices (ou de la roue directrice) en agissant sur le volant (ou le guidon). L'effort ainsi créé entre la route et la bande de roulement fait tourner le véhicule.
C'est également en faisant varier l'effort différentiel entre les deux côtés d'un véhicule que l'on fait tourner un véhicule à chenilles.
Historique
L'histoire de la direction est d'abord celle appliquée aux véhicules hippomobiles : le problème s'est posé dès que le véhicule a eu plus d'un essieu. Il semble qu'il ait existé des chariots à quatre roues sans direction. Le timon articulé faisait alors riper l'essieu avant. Cependant, dans le cas des véhicules motorisés, la «direction par ripage» (en anglais : « skid steering »), est toujours utilisée :
- Sur des engins civils ou militaires sans roues directrices (solution un peu sommaire mais rustique et efficace). Exemples : chargeuses compactes à quatre roues motrices du fabricant Bobcat Company, engin à six roues motrices AMX-10 RC de l'armée française ;
- Obligatoirement sur les véhicules à deux chenilles.
Essieu rigide
Pour obtenir un vrai système de direction, le choix d'une seule roue orientable a été fait assez tôt mais au détriment de la stabilité. En fait, le système de direction le plus répandu pendant plusieurs siècles fut celui où l'essieu directeur du véhicule est rigide et articulé autour d'un pivot central vertical : la «cheville ouvrière». Ce système[1] a été appliqué aux premières automobiles comme les Clément-Panhard.
En 1948, l'américain Tucker a inventé le Sno-Cat, un véhicule à 4 chenilles à 2 essieux articulés autour de pivots et asservis pour pivoter en sens inverse. Contrairement au «skid steering», le système est très efficace et le Sno-Cat est toujours fabriqué, sa principale utilisation étant pour le damage de sentier de motoneige ou de pistes de ski.
Un autre système utilisé par les gros véhicules hors-route consiste à avoir un châssis articulé son milieu[2], chaque partie étant supportée par un essieu comme sur les chargeuses sur roues ou les tracteurs de ferme grand format.
Essieu brisé (roues couplées)
La direction à cheville ouvrière n'étant pas satisfaisante pour la stabilité en virage, l'idée de désolidariser les fusées des roues vit rapidement le jour, même pour les véhicules hippomobiles. Différents modes de couplage plus ou moins complexes furent utilisés.
Un système original fut celui utilisé sur le véhicule à vapeur d'Amédée Bollée-père : les deux roues directrices étaient couplées par une chaîne à une roue dentée (elliptique) solidaire du volant.
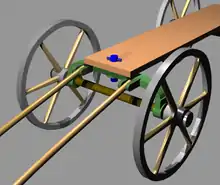
La formalisation géométrique de la direction par l'épure de Jeantaud[3] conduit assez rapidement à utiliser une barre de direction qui relie rigidement des biellettes de direction. C'est de ce système, non rigoureux du point de vue mathématique mais tout à fait satisfaisant[4] dans la réalité, que sont dérivées toutes les directions automobiles actuelles[5]. En pratique, on peut utiliser un angle de roue intérieure au virage de 45° tandis que celui de la roue extérieure sera à 110°.
- Épure de Rodolphe Ackermann/ Jeantaud
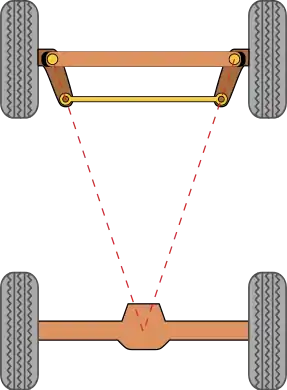 Lorsque la trajectoire est rectiligne, les deux lignes droites prolongeant les biellettes de direction se coupent au milieu de l'essieu arrière.
Lorsque la trajectoire est rectiligne, les deux lignes droites prolongeant les biellettes de direction se coupent au milieu de l'essieu arrière.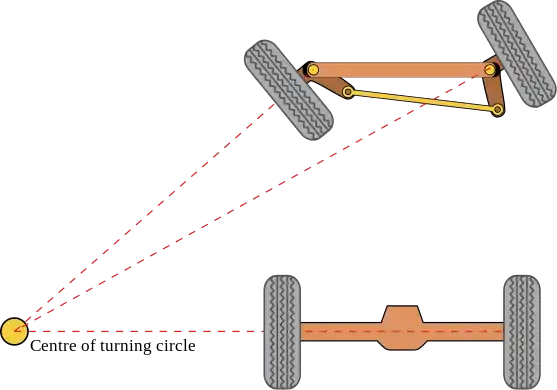 En virage, les axes des roues directrices se coupent au « centre Instantané de rotation » situé sur le prolongement de l'essieu arrière.
En virage, les axes des roues directrices se coupent au « centre Instantané de rotation » situé sur le prolongement de l'essieu arrière.
Technique actuelle

Une direction traditionnelle à deux roues directrices comporte :
- le volant et l'axe du volant (ou colonne de direction),
- le boîtier de direction chargé de transformer un mouvement de rotation du volant en mouvement de translation,
- le bras de commande et d'accouplement qui peut être une crémaillère,
- les biellettes assurant la liaison entre la partie suspendue et la partie non suspendue du train directeur,
- les porte-fusées des roues directrices qui tournent autour d'un axe proche de la verticale.
Une direction courante comporte :
- une colonne de direction,
- un boitier de direction,
- une bielle pendante,
- un manchon à rotule, une barre de direction et un levier d'attaque,
- deux leviers d'accouplement et deux rotules
- une barre d'accouplement permettant de transmettre le mouvement aux deux roues.
Quatre roues directrices (4RD)
(En anglais : four wheel-steering, soit 4WS)
Pour améliorer les capacités d'évolution du véhicule classique à quatre roues, on imagina assez rapidement un système où toutes les roues seraient directrices et motrices. Certains tracteurs militaires de l'artillerie de la Première Guerre mondiale étaient ainsi équipés.
Les quatre roues directrices peuvent être braquées en sens inverse sur une même courbe (rayon de giration du véhicule réduit) ou dans le même sens : on dit que le véhicule « marche en crabe ». Compte tenu des capacités de manœuvre ainsi obtenues, ce système est largement répandu sur certains tracteurs agricoles, véhicules de travaux publics et beaucoup de véhicules de manutention, tels les tracteurs d'aéroports, par exemple.
Sur le véhicule de tourisme, lorsque Honda proposa un tel système sur sa Prelude en 1987, la plupart des constructeurs furent prêts à considérer que c'était une innovation majeure. Parmi les avantages avancés, celui de l'amélioration de la tenue de route à grande vitesse semblait le plus prometteur : un braquage identique des deux essieux permettait un déport latéral avec une vitesse de lacet plus faible qu'un véhicule ordinaire. Quelques-uns comme Mazda, Toyota et Mitsubishi proposèrent des systèmes 4RD pilotés par hydraulique en option, mais la solution de Honda restait originale car entièrement mécanique et donnant l'illusion de s'adapter à la vitesse du véhicule.
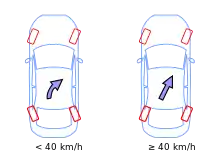
En réalité, lorsque, par exemple, l'on braque un peu vers la droite, (ce qui se produit donc à vitesse dite « élevée »), les roues arrière braquent légèrement vers la droite aussi ; puis, lorsque l'on braque complètement à droite (ce qui se produit donc à vitesse dite « faible », lors de manœuvres), les roues arrière partent complètement vers la gauche.
On facilite donc les passages en courbe et l'assise du véhicule, mais aussi les manœuvres de parking et créneaux en donnant à la voiture un rayon de braquage incroyablement faible.
Le succès ne fut pas au rendez-vous car le comportement du véhicule fut considéré comme « déroutant » malgré ses qualités.
En 1991, Honda propose à nouveau ce système sur son coupé Prelude (2.2Vtec BB1 et 2.3i BB2). Cette fois ci le système est entièrement géré électroniquement et asservi à la vitesse et à l'angle du volant. Il n'est donc plus « purement » mécanique comme sur la génération précédente. L'effet immédiat reste la discrétion de cette seconde génération de 4RD, qui tout en restant efficace, efface le côté déroutant de la première génération. Ce système sera reconduit sur les Prelude de cinquième génération (2.2Vtec BB6) fabriquées jusqu'en 2001, date de l'arrêt de la gamme Prelude.
Le système avec électronique fait encore partie des options proposées par certains constructeurs sur des véhicules haut de gamme ou 4×4. Par contre, monté sur des véhicules de sport, certains pilotes de rallye le considèrent comme extrêmement efficace. Le système est interdit dans la grande majorité des catégories de compétition, dont la Formule 1.
En 2008, Renault remet au goût du jour un système 4RD actif sur la Laguna III GT, en le couplant au système de correction ESP, puis sur la Coupé. Le système s'appellera « Active Drive » puis « 4Control ».
L'actionneur électrique et le calculateur fournis par AISIN permettent de faire tourner les roues arrière jusqu'à 3,5°. La stratégie adoptée par Renault est de braquer en sens inverse du train avant jusqu'à 60 km/h puis dans le même sens au-delà.
Début 2009, BMW lance sa série 7 avec les quatre roues motrices et directrices.
Sur les véhicules récents, les effets favorables d'un tel système sont rendus, sans 4RD, à plus faible amplitude, par la géométrie et la flexibilité du train arrière. On obtient ainsi une orientation différenciée des roues arrière en appui dans un virage. Ce système prend selon les constructeurs divers noms : « essieu directionnel », « essieu arrière multibras », « braquage induit contrôlé », etc.
Cette solution a notamment fait le succès de la Citroën ZX, une des premières voitures de série à en être équipée, louée par la presse automobile pour sa tenue de route sur parcours sinueux, toutefois ce système ne permet pas le mode de braquage à basse vitesse (inférieur à 40 km/h) qui est très intéressant pour les manœuvres de parking et de créneau.
Exemples d'automobiles 4RD
- Audi Q7 (deuxième génération sortie en 2015)[6]
- Acura RLX (P-AWS)
- BMW 850 CSi
- BMW série 7 (2009)[7]
- BMW série 5 (2011)
- Chevrolet Silverado (2002–2005)
- Efini MS-9
- GMC Sierra (2002–2005)
- GMC Sierra Denali (2002–2004)
- Honda Prelude (1987-2001)
- Honda Accord (1991)
- Honda Ascot Innova (1992–1996)
- Infiniti FX50 AWD (2008–présent)
- Infiniti G35 Sedan (2007–2014)
- Infiniti G35 Coupe (2006–2014)[8]
- Infiniti Jt (1993–1994)
- Infiniti M (2006–2014)
- Infiniti Q45t (1989–1994)
- Lexus GS (2013-présent)
- Mazda 929 (1992–1995)
- Mazda 626 (1988)
- Mazda MX-6 (1989–1997)
- Mazda Xedos 9 (1996–2003)
- Mercedes-Benz Vito (version taxis londoniens[9])
- Mitsubishi Galant/Sigma
- Mitsubishi GTO
- Nissan Cefiro (A31)
- Nissan 180SX
- Nissan 240SX/Silvia
- Nissan 300ZX
- Nissan Laurel
- Nissan Fuga/Infiniti M
- Nissan Silvia
- Nissan Skyline GTS, GTS-R, GTS-X (1986)
- Nissan Skyline GT-R
- Porsche 911 Turbo (991) [10] - [11]
- Porsche 911 Turbo S (991)
- Porsche 911 GT3 (991)
- Porsche 911 GT3 RS (991)
- Porsche 911 R (991)
- Renault Laguna III (version GT depuis 2007, puis 4Control avec la phase 2)
- Renault Espace (2015-présent)
- Renault Talisman (2015-présent)
- Renault Mégane (version GT, 2016)
- Subaru Alcyone SVX JDM (1991–1996)
- Toyota Aristo (1997)
- Toyota Camry / Vista JDM 1988–1999 (en option)
- Toyota Carina ED / Toyota Corona EXiV
- Toyota Celica (1990–1993 ST183 et 1994–1997 ST203)
- Toyota Soarer (UZZ32)
Autres véhicules à 4D
- Fresia F18
Règlementation
Le règlement ONU 79 relatif à l'"équipement de direction" définit l'équipement de direction comme un ensemble servant à diriger le véhicule et incluant la commande de direction, la timonerie de direction, les roues directrices et l'alimentation en énergie, le cas échéant[12].
Le règlement ONU 79 relatif à l'"équipement de direction" définit la « timonerie de direction » comme tous les organes qui constituent un lien fonctionnel entre la commande de direction et les roues directrices[12].
Le règlement ONU 79 relatif à l'"équipement de direction" définit une « fonction de direction à commande automatique (ACSF) », comme une partie de commande électronique où le système de direction résulter d'une évaluation automatique pour aider le conducteur[12].
Le règlement différencie différents types d'automatismes de directions :
- ACSF de catégorie A: aide le conducteur, lors d’une manœuvre à petite vitesse ou de stationnement (notion de stationnement automatique);
- ACSF de catégorie B1: aide le conducteur à maintenir le véhicule dans la voie qu’il a choisie (LKA),
- ACSF de catégorie B2: "maintient le véhicule dans sa voie en influençant son déplacement latéral pendant des périodes assez longues, sans commande ou confirmation supplémentaire du conducteur" ;
- ACSF de catégorie C: manœuvre latérale simple (comme un changement de voie) commandée par le conducteur;
- ACSF de catégorie D: manœuvre latérale simple (comme un changement de voie) après confirmation du conducteur ;
- ACSF de catégorie E: manœuvres (comme un changement de voie) exécutées sans commande ou confirmation supplémentaire du conducteur[12].
Voir aussi
- Direction assistée
- Géométrie directionnelle d'Ackermann
Notes et références
- ↑ Les deux inconvénients sont la moindre stabilité en virage et l'espace important nécessairement laissé libre sous la caisse (ou le châssis).
- ↑ Direction par « articulation centrale » qui se rencontre particulièrement sur des véhicules de chantiers robustes, à deux ponts moteurs rigides.
- ↑ Appelé aussi épure d'Ackermann hors de France, en mémoire de Rudolf Ackermann (1764-1834) et de Charles Jeantaud (1840-1906).
- ↑ Du moins pour les utilisations routières pour lesquelles un rayon de virage trop petit serait dangereux.
- ↑ La législation impose la présence d'une liaison mécanique pour les véhicules routiers ordinaires.
- ↑ (en) The new Audi Q7 – Sportiness, efficiency, premium comfort - Audi MediaCenter, 12 décembre 2014
- ↑ (en) Angus MacKenzie, « First Look: 2009 BMW 7 Series », Motor Trend,
- ↑ (en) Erik Johnson, « 2008 Infiniti G37 Sport Coupe », Car&Driver,
- ↑ (en) Hail, the new London cab - Evening Standard, 26 juin 2008
- ↑ (en) Chris Nagy, « Turbo Terror: New Porsche 911 Turbo Announced », Automoblog.net,
- ↑ (en) Rear-axle steering : 911 Turbo - Site officiel de Porsche
- 1 2 3 4 http://www.unece.org/fileadmin/DAM/trans/main/wp29/wp29regs/2018/R079r4f.pdf