| Organisation | Roscosmos |
|---|---|
| Lancement | 12 octobre 1982 |
| Site | glonass-iac.ru |
| Orbite | Orbite terrestre moyenne |
|---|---|
| Période de révolution | 8/17 jour sidéral ou 11 heures et 16 minutes |
| Période de revisite | 8 jours sidéraux |
GLONASS (en russe : ГЛОНАСС, acronyme pour глобальная навигационная спутниковая система, globalnaïa navigatsionnaïa spoutnikovaïa sistéma, soit « système global de navigation satellitaire ») est un système de positionnement par satellites d'origine soviétique et géré par les forces spatiales de la fédération de Russie. Sa conception par le bureau d'études NPO PM (renommé par la suite ISS Reshetnev) débute en 1980 et il devient opérationnel en 1996. Mais la crise financière et économique qui frappe la Russie durant les années 1990 ne lui permet pas de maintenir un nombre de satellites suffisant. Le service complet n'est restauré qu'au début des années 2010.
Le segment spatial utilise vingt-quatre satellites circulant sur une orbite moyenne répartis sur trois plans orbitaux à une altitude de 19 100 km. Une des spécificités de Glonass par rapport aux autres systèmes de navigation par satellite est l'inclinaison orbitale élevée (64,8° contre 55/56° pour les systèmes GPS, Galileo et Beidou). Cette caractéristique permet une meilleure couverture des régions polaires qui représentent une fraction importante du territoire de la Russie. Plusieurs générations de satellite aux capacités croissantes se sont succédé. La première version était caractérisée par une durée de vie relativement brève (3 à 4 ans). Elle est remplacée à compter de 2001 par les Glonass-M d'une durée de vie de 7 ans puis en 2011 par les Glonass-K dont la masse est fortement réduite et la durée de vie portée à 10 ans.
Contexte
Les prédécesseurs : les systèmes de navigation par satellite Tsiklon/Parous/Tsikada
Glonass n'est pas le premier système de positionnement par satellites conçu par l'Union soviétique. Dès le début de l'ère spatiale, ce pays développe un système baptisé Tsiklon reposant sur l'analyse de l'effet Doppler du signal radio transmis par une constellation de plusieurs satellites circulant sur une orbite basse. A l'époque le monde est en pleine guerre froide et l'Union soviétique développe des missiles balistiques intercontinentaux dont la viabilité dépend de la précision de leur frappe. L'objectif du système Tsiklon est de permettre aux sous-marins nucléaires lanceurs d'engins de calculer leur position pour que les missiles lancés depuis ces navires atteignent leur cible avec suffisamment de précision. Le système est déclaré opérationnel en 1982 mais il est rapidement remplacé par le système Parous (Tsiklon-B), qui repose sur le même principe technique et permet d'obtenir une meilleure précision (environ 100 mètres). Parous est un système analogue au système américain Transit développé à la même époque[1],[2]. Une version à usage civil, baptisée Tsikada, est déployée à la fin des années 1970. Une variante baptisée Nadejda, caractérisée par l'emport d'une charge utile Cospas-Sarsat (système de détection des signaux émis par les balises de détresse), est déployée entre 1982 et 2002[3],[4],[5].
Conception du système Glonass
Parous permettait d'obtenir une position précise mais, du fait de la solution technique employée, ne fournissait celle-ci qu'au bout de plusieurs heures. Ces performances n'étaient pas suffisantes dans de nombreux cas de figure en navigation ainsi que pour la nouvelle génération de missiles balistiques. Pour développer un système plus performant les instituts de recherche du ministère de la Défense, de l'Académie des sciences et de la Marine de guerre soviétique travaillent ensemble dès 1968 sur le cahier des charges d'un nouveau système de navigation par satellites interarmes. Celui-ci est finalisé en 1970 après trois ans de travaux. Six ans plus tard, en décembre 1976, le Comité central du Parti communiste de l'Union soviétique et le Conseil des ministres de l'URSS publient un décret (intitulé déploiement du système de navigation spatial unifié GLONASS) qui lance le développement du programme GLONASS. Son développement est confié au Bureau d'études en mécanique appliquée NPO PM (renommé par la suite ISS Reshetnev) qui avait déjà conçu les systèmes Tsiklon et Parous. NPO PM est situé dans la ville fermée (ville dont l'existence est tenue secrète) de Krasnoïarsk-26 dans le krai de Krasnoïarsk en Sibérie occidentale (aujourd'hui Jeleznogorsk)[6].
Plusieurs solutions sont étudiées et la phase de conception s'achève à la fin des années 1970. Le système de navigation par satellites Glonass utilise une toute autre technique, analogue à celle du système américain GPS, reposant sur l'emport d'horloges atomiques à bord des satellites. Il est prévu de maintenir une constellation de 24 satellites circulant sur une orbite moyenne circulaire de 20 000 kilomètres. L'exploitation des signaux de quatre satellites doit permettre de déterminer la position de l'utilisateur avec une précision de 65 mètres (le système fournira finalement cette position avec une précision de 10 mètres et avec le signal dégradé à usage civil de 20 mètres). Les satellites de 1,26 tonne doivent être placés en orbite par grappe de trois par un lanceur lourd Proton. NPO PM n'étant pas équipé pour la production en série des satellites, celle-ci est confiée à PO Polyot implanté à Omsk (Sibérie occidentale)[7],[8].
Déploiement du système Glonass
Déploiement initial (1982-1995)
Il faudra plus d'une décennie pour que le système Glonass soit déclaré comme complètement opérationnel. Le premier satellite de la constellation est lancé le 12 octobre 1982. En 1991, la constellation en orbite comprend 12 satellites, ce qui permet une couverture globale avec toutefois des performances réduites. Le service de positionnement qui était jusque là réservé à un usage militaire est ouvert aux utilisateurs civils en mars 1995. Le 24 septembre 1995, la constellation en orbite atteint 24 satellites et le système Glonass est désormais pleinement opérationnel[9].
En configuration dégradée (1995-2003)
La dissolution de l'Union soviétique est suivie d'une profonde crise économique qui touche plus particulièrement le secteur spatial. Le budget alloué au système Glonass ne permet plus de maintenir une constellation de satellites au complet d'autant que leur durée de vie est particulière courte (3 à 4 ans contre 7 ans pour les satellites GPS). Seulement six satellites sont lancés entre 1995 et 2000 et il ne reste plus en octobre 2000 que six satellites Glonass en état de fonctionner.
Restauration du système Glonass (2003-2011)

Devant l'urgence de la situation, les autorités russes lancent le développement de deux nouvelles générations de satellites, dont la durée de vie est allongée : Ouragan-M (7 ans) et Ouragan-K (10 ans). Le premier satellite Ouragan-M, qui bénéficie d'antennes plus performantes et émet un nouveau signal baptisé L2 pour une utilisation civile est lancé en 2001. Ses signaux permettent une précision de 20 mètres dans le plan horizontal, de 30 mètres dans le plan vertical et 5 cm/s en vitesse. Sa durée de vie est de sept ans. Un lancement le 25 décembre 2007 a placé trois nouveaux satellites en orbite.
En novembre 2003, une déclaration d'intention est signée entre l'Agence spatiale fédérale russe et l'Organisation indienne pour la recherche spatiale pour étudier la possibilité de mettre sur orbite des Ouragan-K au moyen de lanceurs indiens. Elle n'a pas de suite.
Les Ouragan-K pèsent environ 745 kg ; ils permettent une précision de positionnement améliorée de 14 mètres dans le plan horizontal, de 20 m en altitude, 5 cm/s en vitesse et peuvent être lancés par groupe de six par des lanceurs Proton-M/Briz-M. Le lancement du premier Ouragan-K était prévu pour 2008.
Début 2008, seize satellites actifs sont en orbite, ce qui permet la couverture de tout le territoire russe. Les premiers appareils de positionnement étaient prévus pour être commercialisés fin décembre 2007. Cependant, les premiers appareils en service souffrent de défauts fonctionnels (manque de précision, interruption de service…) ou de couverture territoriale insuffisante, ce qui a amené, le 23 janvier 2008, le premier vice-premier ministre russe Ivanov à critiquer sévèrement les concepteurs du système pour les manquements de qualité.
L'Agence spatiale fédérale russe Roscosmos prévoyait la fin de déploiement des vingt-quatre satellites couvrant le monde entier vers la fin 2009. Elle a ensuite décidé de passer à un système comprenant trente satellites en 2011[10]. Il faut dix-huit satellites opérationnels pour avoir une couverture mondiale.
Le 19 mai 2010, le système comptabilise vingt-et-un satellites opérationnels, plus deux de secours. Le 26 septembre 2010, après avoir lancé de nouveaux satellites, la constellation comporte vingt-six satellites en orbite. Le 20 novembre 2010, vingt sont opérationnels, quatre en maintenance et deux en réparation[11].
Le 5 décembre 2010, trois satellites, à la suite d'une défaillance du lanceur Proton, plongent dans le Pacifique à 1 500 kilomètres d'Honolulu. Les satellites étaient de type Glonass-M, d'une masse d'1,4 tonne chacun, leur chute n'a fait ni dégâts ni victimes[12]. Le 8 décembre 2011, pour la première fois, GLONASS assure la couverture de toute la surface terrestre.
Développement des applications
En cette année 2011, le développement de cette constellation a été accéléré et de nombreuses applications civiles lui sont trouvées, sous l'impulsion du gouvernement russe qui déclare vouloir, dès fin 2012, taxer d'un malus tous les produits électroniques disposant d'une compatibilité GPS mais pas d'une compatibilité GLONASS, sur le marché russe.
Les appareils grand-public – téléphones et tablettes – compatibles avec le système GLONASS sont annoncés en 2012, notamment par Samsung Electronics avec la Galaxy Tab 2[13] et le Samsung Wave 3[14], Google avec le Nexus 4[15], ou encore Apple avec l'iPhone 4S[16].
Maintenance du système
En 2013, la constellation russe GLONASS comprend vingt-huit satellites de navigation Glonass dont vingt-quatre satellites opérationnels, aucun satellite de réserve, deux satellites en maintenance et deux satellites en période d'essais[17].
Le vendredi 26 avril 2013 à 5 h 23 UTC, un lanceur Soyouz 2.1b lance avec succès un satellite Glonass-M depuis le cosmodrome russe de Plessetsk[18].
Le 8 juin 2013, le commandant des troupes russes de défense aérospatiale Alexandre Golovko a annoncé au cosmodrome russe de Plessetsk le lancement de quatre nouveaux satellites en 2013. Le lancement de trois satellites par un lanceur Proton est prévu depuis le cosmodrome de Baïkonour.
Le 2 juillet 2013, une fusée Proton-M emportant trois satellites GLONASS explose après dix secondes de vol[19].
Annonce d'une nouvelle version : l'Ouragan KM (2013)
Une nouvelle version des satellites Ouragan, baptisée Ouragan KM, est annoncée officiellement en 2012 avec un premier lancement programmé en 2017. Mais le premier lancement est repoussé à plusieurs reprises et ne devrait pas intervenir avant 2023[20].
Description du système Glonass
Comme tous les systèmes de positionnement par satellites, GLONASS comprend trois composantes :
- le segment spatial constitué de 24 satellites opérationnels circulant sur une orbite moyenne auxquels s'ajoutent quelques satellites placés en orbite pour permettre le remplacement sans délai d'un satellite défaillant.
- le segment sol nécessaire pour contrôler les satellites, vérifier leur fonctionnement et actualiser les données utilisées pour le calcul de position.
- la partie utilisateur, qui réunit l'ensemble les récepteurs utilisant les signaux des satellites. Deux types de prestations sont mis à disposition : le SPS est le service mis à disposition de tout utilisateur et le PPS, fournissant une position plus précise, nécessite des clés de décodage et est réservé aux militaires
Segment terrestre

La composante sol du système de positionnement par satellites Glonass comprend des stations qui sont situées sur le territoire de la Russie, hormis quelques stations situées au Brésil et au Nicaragua[21]. Les stations situées sur le territoire russe sont les suivantes[22] :
- la station de contrôle (TsUS-UM) de Krasnoznamensk dans la région de Moscou qui analyse les données sur l'état de santé des équipements des satellites ainsi que leur orbite et corrige éventuellement cette dernière ou envoie des instructions aux équipements des satellites.
- la station de contrôle temporel qui est située à Chtchiolkovo également dans la banlieue de Moscou. Elle est chargée de la synchronisation des horloges atomiques embarquées sur les satellites Glonass avec l'échelle de temps Glonass.
- cinq stations de suivi de la constellation situées à Saint-Pétersbourg, Chtchiolkovo, Ienisseïsk (Sibérie occidentale), Oussouriïsk et Komsomolsk-sur-l'Amour (Sibérie orientale). Ces stations recueillent les télémesures transmises par les satellites, leur transmettent les commandes et déterminent leur orbite. Elles utilisent des radars et des lasers.
- Enfin six autres stations sont uniquement chargées des opérations de surveillance et de mesure des orbites[23].
Segment spatial

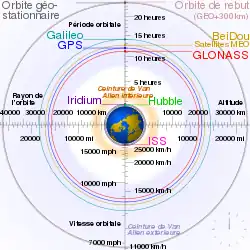
L'orbite de la Lune est environ 9 fois plus grande que l'orbite géostationnaire.[Note 2] Dans le fichier SVG, placez la souris sur une orbite ou son étiquette pour la mettre en évidence ; cliquez pour ouvrir l'article correspondant
{kind=link}
Le segment spatial du système de positionnement par satellites Glonass est constitué par une constellation de vingt-quatre satellites, répartis sur trois plans orbitaux à une altitude de 19 100 km. L'orbite est parcourue en 11 h 15 min 44 s. Une des spécificités de Glonass par rapport aux autres systèmes de navigation par satellite est l'inclinaison orbitale élevée (64,8° contre 55/56° pour les systèmes GPS, Galileo et Beidou). Cette caractéristique permet une meilleure couverture des régions polaires qui représentent une fraction importante du territoire de la Russie. À la différence du système GPS, les satellites de la constellation, vus du sol, se retrouvent à la même place par rapport au sol après huit jours sidéraux. Huit satellites sont prévus pour chaque plan orbital. Trois de ces satellites (un par plan orbital) ne sont pas utilisés mais sont là en secours pour remplacer un satellite défaillant.
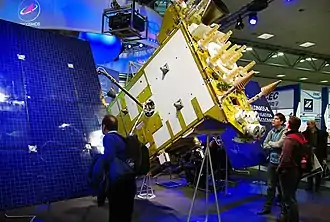
Plusieurs générations de satellites ont été utilisés par le système Glonass. Tous sont fabriqués par la société ISS Reshetnev (anciennement NPO PM). Ils sont tous stabilisés 3 axes et circulent sur une orbite similaire. Les principales différences portent sur la plateforme utilisée (allégement de la masse et allongement de la durée de vie) et les charges utiles secondaires.
| Caractéristique | GPS | GLONASS | GALILEO | Beidou/Compass |
|---|---|---|---|---|
| Segment spatial | ||||
| Altitude | 20 200 km | 19 100 km | 23 222 km | 21 528 km |
| Inclinaison | 55° | 64,8° | 56° | 55° |
| Période orbitale | 11 h 58 | 11 h 15 | 14 h 7 | 12 h 53 |
| Nombre de plans orbitaux | 6 | 3 | 3 | 3 |
| Nombre de satellites opérationnels | 31 | 24 | 24 | 27 + 5 |
Satellite de navigation
| Constructeur |
ISS Reshetnev |
|---|---|
| Programme | Glonass |
| Domaine | Navigation par satellite |
| Nombre d'exemplaires |
Ouragan : 87 Ouragan-M : 53 Ouragan-K : 5 (décembre 2022) Ouragan-K2 : 0 Ouragan-KM : 0 |
| Constellation | oui |
| Statut | Opérationnel |
| Autres noms | Glonass |
| Lancement |
Ouragan : 1982-2005 Ouragan-M : 2001-2022 Ouragan-K : 2011-? Ouragan-K2 : 2023?- |
| Lanceur |
Ouragan/Ouragan-M : Proton : Ouragan-M/K/K2 : Soyouz-2-1b/Fregat |
| Durée de vie |
Ouragan : 3 ans Ouragan-M : 7 ans Ouragan-K/K2 : 10 ans Ouragan-KM: 12 ans |
| Site | glonass-iac.ru |
| Masse au lancement |
Ouragan/Ouragan-M : ~1 415 kg Ouragan-K : ~962 kg Ouragan-K2 : ~1 645 kg Ouragan-KM : ~1 265 kg |
|---|---|
| Masse instruments |
Ouragan : ~180 kg Ouragan-M : ~250 kg Ouragan-K : ~260 kg |
| Plateforme | Ouragan-K : Ekspress-1000K |
| Contrôle d'attitude | Stabilisé 3 axes |
| Source d'énergie | Panneaux solaires |
| Puissance électrique |
Ouragan : 1000 Watts Ouragan-M : 1450 Watts Ouragan-K : 1270 Watts Ouragan-K2 : 4370 Watts Ouragan-KM : 3000 Watts |
| Périgée | 19 100 km |
|---|---|
| Apogée | 19 100 km |
| Inclinaison | 64.8° |
Ouragan
La première version des satellites Ouragan/Glonass a une masse de 1 413 kg et une durée de vie de 4 ans. L'énergie est fournie par des panneaux solaires qui produisent 1000 watts dont 600 utilisés par la charge utile. Cette dernière a une masse de 180 kilogrammes. La précision de pointage des panneaux solaires est de 5 degrés. La précision du contrôle d'orientation est de 0,5 degré[24],[20].
Les satellites sont placés en orbite par groupe de trois par une fusée Proton-K décollant du cosmodrome de Baïkonour. 87 exemplaires sont lancés entre 1982 et 2005. Pour les premiers vols, un à deux satellites sont remplacés par des maquettes ayant une masse similaire pour tester le déploiement de trois satellites[24].
Ouragan-M
La version Ouragan-M émet un nouveau signal L2 qui est destiné à répondre aux besoins d'utilisateurs non militaires. Ces signaux permettent d'obtenir une position avec une précision de 20 mètres dans le plan horizontal, de 30 mètres dans le plan vertical et 5 cm/s en vitesse. Par ailleurs la durée de vie est allongée, passant de 3 à 7 ans, et le satellite bénéficie d'antennes plus performantes. La puissance électrique fournie par les panneaux solaires passe de 1000 à 1450 watts dont 580 utilisés par la charge utile. Cette dernière a une masse de 250 kilogrammes. La précision de pointage des panneaux solaires est de 2 degrés. La précision du contrôle d'orientation est de 0,5 degré[25],[26],[20].
53 satellites sont lancés entre 2001 et 2022 par des fusées Proton-K et Proton-M décollant du cosmodrome de Baïkonour (2 échecs soit 6 satellites perdus) et des fusées Soyouz 2-1b/Fregat décollant du cosmodrome de Plessetsk. Les Proton emportent trois satellites tandis que les Soyouz emportent un seul satellite[25].
Ouragan-K
La version Ouragan-K inaugure une nouvelle plateforme (Ekspress-1000). Contrairement à celle utilisée par les versions précédentes, les équipements ne sont pas enfermés dans une structure pressurisée, ce qui permet d'alléger la masse du satellite qui passe de 1570 kilogrammes à 962 kg. Par ailleurs la durée de vie est allongée, passant de 7 à 10 ans. La puissance électrique fournie par les panneaux solaires passe de 1450 à 1270 watts dont 750 utilisés par la charge utile. Cette dernière a une masse de 260 kilogrammes. La précision de pointage des panneaux solaires est de 1 degré. La précision du contrôle d'orientation est de 0,5 degré[27],[20].
Le premier Ouragan-K est lancé en 2011. Courant décembre 2022, cinq satellites de ce type ont été placés en orbite depuis le cosmodrome de Plessetsk par une fusée Soyouz 2-1B/Fregat emportant à chaque fois un seul exemplaire[27].
Ouragan-K2
La version Ouragan-K2 a une masse nettement plus importante que la version précédente (celle-ci passe de 962 à 1645 kg) et sa hauteur est de 6 mètres contre 3 mètres pour la génération précédente. La production des panneaux solaires augmente également fortement, passant de 1600 watts à 4370 watts. Ces chiffres s'expliquent sans doute en partie par l'emport de nouvelles charges utiles secondaires. Le satellite émettra trois types de signal au lieu de deux. Le système de contrôle thermique ne repose plus sur la circulation de fluide caloporteur mais sur des revêtements isolants qui permettent, selon son constructeur, de maintenir la température de l'avionique dans une fourchette de 0,1 degré. Le développement de cette version a pris beaucoup de retard. L'embargo des pays occidentaux sur les composants électroniques découlant des sanctions prises après l'annexion de la Crimée par la Russie a contribué au glissement du calendrier. Le lancement du premier satellite qui était initialement planifié en 2013 est attendu en 2023 (actualisation décembre 2022)[28],[29],[30].
Ouragan-KM
L'Ouragan KM, dont le premier exemplaire pourrait être lancé en 2023, se différencie notamment par sa durée de vie qui est allongée à 12 ans et la quantité d'énergie fournie par ses panneaux solaires (3000 watts). Sa masse est de 1265 kilogrammes. Deux exemplaires peuvent être lancés par une fusée Angara/Briz-M ou un seul exemplaire par une fusée Soyouz-2/Fregat[20].
Charges utiles secondaires
Les dernières générations de satellites Glonass emportent des charges utiles secondaires dont la fonction n'a aucun rapport avec leur mission principale. Ce sont[30] :
Détecteur d'explosion nucléaire Lira
Le détecteur d'explosion nucléaire Lira (Lyre en français). Lira semble avoir été conçu à la fin années 1980 lorsque les satellites américains GPS ont été équipés de ce type de détecteur. Le développement de Lira a été confié en 1990 par NPO PM au Centre de recherche optique et physique (NTsOFI). À la suite de difficultés financières, NTsOFI a annulé le projet qui a été confié à l'Institut de recherche scientifique sur la construction des équipements de précision (NII PP) rebaptisé par la suite Société scientifique et industrielle des systèmes instrumentaux de précision (NPK SPP). L'instrument Lira est introduit sur la version Glonass-M dont le premier exemplaire est lancé en décembre 2004. Mais ce n'est qu'en 2019 que le système Lira devient opérationnel. L'équipement Lira installé sur les satellites Glonass-M, baptisé BAL-M, comprend plusieurs détecteurs dont on a une connaissance fragmentaire grâce à différents articles. Un premier type de détecteur est chargé de détecter le rayonnement ionisant émis par l'explosion nucléaire sous forme de rayons gamma. Il est constitué de trois scintillateurs installés à différents emplacements du corps du satellite pour éviter les fausses alertes. Il est complété par un détecteur optique qui observe l'explosion nucléaire dans le spectre optique et proche infrarouge. Celui-ci détermine en utilisant plusieurs filtres le temps mis par le signal pour arriver jusqu'au satellite ainsi que l'amplitude et la longueur de celui-ci. Le lieu de l'explosion nucléaire est déterminé en rapprochant les observations de l'explosion effectuées par plusieurs satellites Glonass. Le système est capable de détecter les explosions nucléaires d'une puissance allant de un kilotonne équivalent TNT à cinq mégatonnes se produisant entre le sol et une altitude de 20 000 kilomètres en localisant celle-ci avec une précision de 300 mètres. Les utilisateurs reçoivent l'information dans un délai de 30 secondes si les satellites Glonass observant le phénomène sont visibles par les terminaux. Les satellites des générations suivantes Glonass-K et Glonass-K2 doivent revoir une version améliorée de l'équipement Lira mais peu d'informations sont disponibles sur ses capacités. Bien que les satellites Glonass-M disposent d'une liaison inter-satellites radio, il ne semble pas que celle-ci puisse être utilisée pour relayer l'information jusqu'à un terminal utilisateur situé hors de portée des satellites ayant détecté l'explosion[30].
Le segment sol du système du système Lira est constitué d'un centre spécialisé qui élabore les commandes et analyse les télémesures concernant cet équipement. Ces données sont reçues et transmise par le centre de contrôle principal du système Glonass (TsUS-UM). Les terminaux (NAPOI) exploitant les données transmises par Lira sont de deux types : mobile (NAPOI-M) et fixe (NAPOI-S). Fin 2016, une quarantaine de véhicules étaient équipés de terminaux NAPOI-M.
Plusieurs publications scientifiques démontrent que Bal-M est également utilisé pour effectuer des observations astronomiques : détection de sursaut gamma, mesures du rayonnement cosmique et galactique ainsi que des interactions entre le Soleil et l'ionosphère, observations des éclairs et de l'activité volcanique[30].
Récepteurs de message de détresse KSPS-MO et Cospas-Sarsat
Plusieurs satellites Glonass-K sont équipés de récepteurs radio permettant de capter et relayer les messages de détresse émis par des balises du système international Cospas-Sarsat. Ces récepteurs viennent compléter ceux équipant à la fois certains satellites russes (satellites météorologiques Meteor-M 2-2 et Elektro-L, de télécommunications Loutch), des satellites météorologiques américains (GEOS, NOAA), européens (Météosat, MetOp) et indiens (GSAT) ainsi que des satellites de navigation américains (GPS) et européens (Galileo). Les satellites de la version Glonass-K2 doivent être équipés en plus de récepteurs KSPS-MO permettant de capter et relayer des messages de détresse émis par des balises conçues spécifiquement pour les militaires russes et dont le fonctionnement est analogue aux équipements Cospas-Sarsat. Les messages de détresse sont relayés par ce système aux services du ministère de la défense russe[30].
Ruveta : désignateur de cible pour missile à longue portée lancé depuis navire
Le système Ruveta (en français escolier) est un équipement couvert par le secret défense et pour lesquels peu d'informations ont filtré. Il s'agit d'un système de renseignement d'origine électromagnétique conçu pour fournir des cibles aux missiles à longue portée (3M-54 Kalibr) lancés depuis les navires militaires russes. Ce système doit être installé sur la version Glonass-K2. Il est complémentaire des équipements embarqués à bord des satellites Loto-S et Pion-NKS circulant sur des orbites de 900 km avec une inclinaison orbitale de 67 degrés[30].
Performances
Le système GLONASS est un concurrent du système GPS, il offre une précision de 5 à 8 mètres avec sept à huit satellites en vue. Le GPS offre une précision de 2 à 9 mètres avec six à onze satellites en vue. La précision de fonctionnement du GLONASS devait être portée à 5,5 m en 2010, et à 2,8 m en 2011[31].
Statut

.gif)
| Nombre de satellites en orbite | 25 |
|---|---|
| Opérationnels | 23 |
| En cours de qualification | 1 |
| En maintenance | 0 |
| En cours de vérification par l'opérateur | 0 |
| En réserve | 0 |
| En cours de test | 1 |
Utilisation

Le système GLONASS est utilisé dans le domaine civil par les géomètres et les topographes qui se servent de récepteurs satellites compatibles avec les signaux GPS et les signaux GLONASS. Le système d'overlay EGNOS utilise conjointement les signaux GPS et GLONASS.
Caractéristiques techniques
Les principales caractéristiques du systèmes Glonass sont similaires à celles des systèmes GPS et Galiléo. Il existe toutefois quelques différences[33] :
- La structure des signaux émis par les satellites Glonass est différente de celle des signaux GPS et Galileo. Le terminal utilisateur doit pouvoir distinguer les signaux émis par les différents satellites. Pour ce faire, les satellites GPS et Galileo utilisent tous la même fréquence mais avec une séquence de code différente (technique CDMA pour Code Division Multiple Acces). Les satellites Glonass utilisent eux tous la même séquence de code mais émettent sur une fréquence différente (FDMA pour Frequency Division Multiple Access). Ce choix simplifie les opérations de corrélation et d'acquisition du récepteur et réduit le risque d'interférence par un système externe. Par contre, il complexifie les composants chargés de la collecte du signal ce qui se traduit pas un surcoût. Chaque bande de fréquence allouée au signal est découpée en douze fréquences d'émission. Dans la mesure où la constellation Glonass comporte 24 satellites, une fréquence donnée est utilisée par deux satellites. Les satellites partageant la même fréquence sont choisis de manière à être à l'opposé l'un de l'autre par rapport à la Terre.
- GLONASS utilise initialement le système géodésique russe PZ-90 qui est sensiblement différent du système WGS 84 ; comme les paramètres de transformation entre les deux systèmes géodésiques n'étaient pas connus précisément, il convenait de bien faire attention aux systèmes auxquels on se référait. Un récepteur exploitant simultanément les signaux des satellites GPS et Glonass devait appliquer un calcul d'ajustement mais en laissant subsister un écart de position variable selon la position de l'utilisateur mais pouvant atteindre plusieurs mètres. En septembre 2007, le système géodésique est modifié : baptisé PZ-90.02, il est désormais conforme à la norme ITRF2000, auquel se conforme WGS 84[34].
Coopération
L'Inde est associée, dans le cadre d’un accord intergouvernemental signé en 2004, à la réalisation de GLONASS. C'est le seul pays à avoir accès au volet militaire de ce système. En septembre 2010, les deux parties ont signé un accord pour produire en commun des équipements de navigation destiné à ce système. Il est aussi prévu que l’Inde mette sur orbite deux satellites russes, New Delhi ayant déjà participé au financement du développement de satellites de troisième génération Glonass-K dont le premier prototype a été lancé en février 2011. C’est aussi la première fois que la Russie accepte un lanceur étranger pour mettre sur orbite des satellites russes[35].
La Russie a fait savoir qu'elle était intéressée à coopérer au système de positionnement de l'Union européenne, Galileo. Le système GLONASS ne sera cependant pas abandonné, mais Galileo serait son complément à partir de sa véritable entrée en service (vers 2014). Des discussions ont également lieu concernant l'interopérabilité entre GLONASS et GPS[36].
Era GLONASS
Le chef de l'Agence fédérale spatiale russe, Anatoli Perminov, a déclaré qu'il y aurait un nouveau grand projet GLONASS en Russie appelé ERA-GLONASS (ru) (russe : экстренное реагирование при авариях, réaction urgente à des avaries).
La première phase du projet comprendra l'équipement des véhicules automobiles de récepteurs GLONASS et de la création d'une technologie, qui permet aux opérateurs de service d'urgence 112 d'utiliser des données géographiques. La deuxième phase comprendra aussi GPS/GLONASS les téléphones et smartphones.
Il est également prévu de lancer un projet appelé « Social GLONASS ». Il permettra d'aider les personnes atteintes de cécité, les personnes âgées et les enfants, qui doivent être aidés[37].
Notes et références
Notes
- ↑ Les périodes et vitesses orbitales sont calculées à partir des relations 4π2R3 = T2GM et V2R = GM, où : R est le rayon de l'orbite en mètres ; T est la période orbitale en secondes ; V est la vitesse orbitale en m/s ; G est la constante gravitationnelle, environ 6,673 × 10−11 Nm2/kg2 ; M est la masse terrestre de la Terre, environ 5,98×1024 kg (1,318×1025 lb).
- ↑ Approximativement 8,6 fois (en rayon et en longueur) lorsque la Lune est au plus près (c'est-à-dire 363 104 km42 164 km), à 9,6 fois lorsque la Lune est au plus loin (c'est-à-dire 405 696 km42 164 km).
Références
- ↑ (en) Mark Wade, « Tsiklon » (consulté le )
- ↑ (en) Mark Wade, « Tsikada » (consulté le )
- ↑ (en) Mark Wade, « Nadezhda », sur Encyclopedia Astronautica (consulté le )
- ↑ (en) Gunter Dirk Krebs, « Nadejda (11F643N, 17F118) », Gunter's space page (consulté le )
- ↑ (en) Gunter Dirk Krebs, « Nadejda-M », Gunter's space page (consulté le )
- ↑ (en) « Glonass » [archive du ], Encyclopedia Astronautica
- ↑ (en) « Start of GLONASS » [archive du ], ISS Reshetnev,
- ↑ (en) « Satellite Navigation of the 21st Century » [archive du ], ISS Reshetnev,
- ↑ (en) Anatoly Zak, « Deployment of the GLONASS constellation », sur russianspaceweb (consulté le )
- ↑ (en) Russia to set world record with 39 space launches in 2009, RIA NOVOSTI, 29 décembre 2008
- ↑ (en) GLONASS constellation status, 20.11.2010г. - Federal Space Agency GLONASS, 20 novembre 2010
- ↑ « Trois satellites russe s'écrasent dans le Pacifique », sur 20minutes.fr, (consulté le )
- ↑ (de) Andreas Sebayang, « Weiteres 10-Zoll-Tablet mit Android 4.0 und Glonass », sur golem.de, (consulté le )
- ↑ « IFA 2011 : Samsung Wave 3, design et puissance au service de Bada 2.0 », sur Zone-Numérique, (consulté le )
- ↑ Rénald, « Test du Nexus 4 de Google et LG », sur Presse-citron, (consulté le )
- ↑ Nicolas Furno, « L'iPhone 4S compatible avec le GPS russe », sur iGeneration, (consulté le )
- ↑ GLONASS_Information-Analytical Center, GLONASS constellation status, 4 juillet 2013
- ↑ (en-US) Patryk Szymczak, « Russia Launches GLONASS-M Satellite », sur GPS World, (consulté le )
- ↑ « Une fusée russe portant trois satellites explose au décollage », Le Monde.fr, (lire en ligne, consulté le )
- 1 2 3 4 5 (en) Anatoly Zak, « Uragan (GLONASS) satellite series », sur russianspaceweb (consulté le )
- ↑ (en) Holger Roonemaa et Michael Weiss, « Western Intelligence Fears New Russian Sat-Nav's Espionage Capabilities », sur New Lines Magazine,
- ↑ Pierre Bosser, GNSS : systèmes globaux de positionnement par satellite, ENSG, , 113 p. (OCLC 936975932, cours-fad-public.ensg.eu/pluginfile.php/1501/mod_resource/content/1/gnss.pdf), p. 73-77
- ↑ (en) « Current and planned global and regional navigation satellite systems and satellite-based augmentation systems »
- 1 2 (en) Gunter Krebs, « Uragan (GLONASS, 11F654) », sur Gunter's Space Page (consulté le )
- 1 2 (en) Gunter Krebs, « Uragan-M (GLONASS-M, 14F113) », sur Gunter's Space Page (consulté le )
- ↑ (en) Gunter Krebs, « Uragan-(M) (GLONASS-(M), 14F17) », sur Gunter's Space Page (consulté le )
- 1 2 (en) Gunter Krebs, « Uragan-K (GLONASS-K, 14F143) », sur Gunter's Space Page (consulté le )
- ↑ (en) Gunter Krebs, « Uragan-K2 (GLONASS-K2, 14F160) », sur Gunter's Space Page (consulté le )
- ↑ (en) Anatoly Zak, « GLONASS-K2 satellite », sur russianspaceweb (consulté le )
- 1 2 3 4 5 6 (en) Bart Hendrickx, « The secret payloads of Russia’s Glonass navigation satellites », sur thespacereview.com,
- ↑ État actuel et perspectives de développement du système mondial de satellites de navigation (GLONASS) de la Fédération de Russie, note de travail de l'Organisation de l'aviation civile internationale [PDF]
- ↑ (en) « Statut de la constellation », The Planetary Society (consulté le )
- ↑ Jean Marc Pieplu, GPS et Galileo : systèmes de navigation par satellites, Paris, Eyrolles, , 163 p. (ISBN 978-2-212-11947-3, OCLC 421525857, BNF 40228632, lire en ligne), p. 115-120
- ↑ (en) The ephemeris information implementing PZ-90.02 reference system has been updated, Federal Space Agency GLONASS, 4 juillet 2008 [PDF]
- ↑ Gilles Bocquérat, « La coopération militaro-industrielle au cœur des relations indo-russes », sur IFRI, [PDF]
- ↑ (en) GPS/GLONASS Joint Statement, Federal Space Agency GLONASS, 14 décembre 2006 [PDF]
- ↑ Russian eCall project: "ERA GLONASS", GLONASS News, 9 novembre 2009
Bibliographe
- Pierre Bosser, GNSS : systèmes globaux de positionnement par satellite, ENSG, , 113 p. (OCLC 936975932, cours-fad-public.ensg.eu/pluginfile.php/1501/mod_resource/content/1/gnss.pdf)Support de cours de l'École nationale des sciences géographiques.
- Jean Marc Pieplu, GPS et Galileo : systèmes de navigation par satellites, Paris, Eyrolles, , 163 p. (ISBN 978-2-212-11947-3, OCLC 421525857, BNF 40228632, lire en ligne).
Voir aussi
Articles connexes
- Système de positionnement par satellites
- Parous / Tsikada Système de navigation par satellite ayant précédé le système GLONASS
- ISS Reshetnev constructeur des satellites Glonass
- Global Positioning System système de positionnement par satellite américain
- Galileo (système de positionnement) système de positionnement par satellite européen
- Beidou système de positionnement par satellite chinois
- Roscosmos
Liens externes
- (ru) (en) Site officiel
- (ru) GLONASS informations