الأذرع الآلية المتلاعبة (Parallel manipulator) هو نظام ميكانيكي يُستخدم على نطاق واسع في العديد من المجالات الصناعية والفضائية والطبية، وتستخدم أيضا في العمليات تحت الماء، وتأخذ مكانة كبيرة في العديد من التطبيقات الصناعية مثل عمليات الختم والحقن والتشكيل وخطوط التجميع، والطباعة ثلاثية الأبعاد. ويكاد لا يخلو أي مصنع من وجود هذه الأذرع الآلية، فهي تعد عنصرا أساسيا في التصنيع، إذ توفر السرعة والدقة في الأداءـ وبسبب تعدد المهام المطلوبة من هذه الذراع الآلية فقد أخذت حيزاً مهما في البحوث العلمية التي سُخرت لأجل تطويرها واستحداث أنواع جديدة منها.
تصنيف الأذرع الآلية المتلاعبة
قُسِم هذا النوع من الروبوتات إلى نوعين هما: الأذرع الآلية التقليدية المتسلسة، وفيها العديد من المشاكل التقنية التي تحد من وظائفها، إضافة إلى سرعتها المنخفضة، وتراكم الأخطاءالمصنعية، والأعطال الكثيرة التي تحدث فيها. وقد وجِهت جهود بحثية كبيرة نحو تصميم وتنفيذ الروبوتات متلاعبة الحركية المتوازية. وتعتمد بشكل أساسي على نظرية الحركة المجردة، وتمتلك العديد من الخصائص مثل السرعة العالية والاستجابة الديناميكية السريعة وتكاد نسبة الخطأ فيها تكون معدومة. وعادةً ما تُستخدم كبديل من الأذرع الآلية المتسلسلة التقليدية.[1]
المكونات
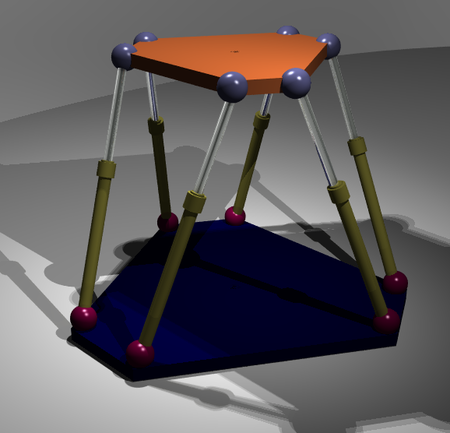
تتألف "الأذرع الآلية المتلاعبة المتوازية" من مفاصل ووصلات ويكون عدد هذه المفاصل غالباً ستة مفاصل. ويربط كل مفصلين بمحرك كهربائي إضافة إلى علبة يتحكم بها بسرعة الحركة، لتخفيض مقدار السرعة الدورانية للمحرك وزيادة العزم الناتج منه وغيرها، ويُربط كل وصلتين بمفصل حيث يربط في أوله بالمحرك الكهربائي وتنتهي جميعا بما يعرف بنهاية الذراع العاملة (End effector)، ولكل محرك كهربائي جهاز حساس لقياس سرعة الدوران وحساب المسافة التي قطعها، إذ يرسل الحساس البيانات إلى السواقة الكهربائي (Driver) للتاكد من صحة المسافة المقطوعة وصحة السرعة والتسارع.[2]
وتربط جميع السواقات بمتحكمة دقيقة مبرمجة لتحكم بها عن طريق إرسالها نبضات وإشارات كهربائيةـ وتربط هذه المتحكمة بحاسوب للتحكم بهما وإرسال البيانات المناسبة على شكل معلومات وبيانات رقمية.
ويحيط بالأذرع الآلية هيكل معدني لحمله وحمايته وعلبة تحتوي على جميع الآجهزة الدقيقة مثل السواقات والمتحكمات الدقيقة.
التحكم بالأذرع الآلية المتلاعبة المتوازية
يوجد الكثير من الطرق للتحكم بالأذرع الآلية المتوازية، وأشهرها نظرية الحركة المجردة (Kinematics) إذ يتم وصف الإحداثيات بزوايا حركية، وتُقسم هذه إلى نوعين:
- الحركة المجردة الأمامية (Forward Kinematic): وتقوم بتحويل الزاويا الحركية إلى إحداثيات ديكاترية (x, Y, Z)
- الحركة المجردة العكسية (Inverse Kinematic):وتقوم بتحويل الإحداثيات الديكادرية إلى زوايا حركية.
يتم في الأذرع الآلية المتلاعبة استخدام كلا النوعين معا ـ إذ يتم استخدام الحركة المجردة العكسية لتحريك الأذرع إلى الإحداثيات الصحيحة وتستخدم الحركة الأمامية لتاكد من صحة هذه الإحداثيات عن طريق قياس الزوايا من الإحساسات وتحويلها إلى إحداثيات ديكارتية للتاكد من صحة موقع الأذرع.
مهام الأذرع الآلية المتزازية المتعددة المهام
تكمن ميزة عمل هذا الروبوت بوجود مصدر مفتوح من البرامج القابلة للتعديل والتحسين عليها لتلائم متطلب العمل المرغوب فيه، وقد تم برمجة هذه الأذرع للقيام بعملية الالتقاط والنقل إلى الموقع الصحيح باستخدام المعالجة الصورية الثلاثية الأبعاد .
تسلسل عمل الروبوت :
- -تشغيل النظام وتثبيت المحركات الكهربائية على نقطة البداية الصحيحة
- -إزاحة الأذرع إلى نقطة بعيدة لفتح المجال أمام الكاميرا للتصوير وتحديد الموقع.
- -أخذ صورة لمنطقة العمل وتحديد إحداثيات الهدف والموقع النهائي.
- -إرسال الأذرع إلى إحداثيات الهدف.
- -التقاط الهدف بوساطة المغناطيس الكهربائي المتصل أسفل الأذرع.
- -نقل الهدف إلى الموقع النهائي.
- -العودة إلى نقطة البداية.
مراجع
- Z. Pandilov and V. Dukovski, " Comparison of the characteristics between serial and parallel robots ", Acta Technical Corvininesis - Bulletin of Engineering, vol. 7, no. 1, pp. 143-160, 2014.
- Tsai, L.W., 1999. Robot analysis: the mechanics of serial and parallel manipulators. John Wiley & Sons.