
Une machine électrique est un dispositif électromécanique fondé sur l'électromagnétisme permettant la conversion d'énergie électrique par exemple en travail ou énergie mécanique. Ce processus est réversible et peut servir à produire de l'électricité :
- les machines électriques produisant de l'énergie électrique à partir d'une énergie mécanique sont communément appelées des génératrices, dynamos ou alternateurs suivant la technologie utilisée ;
- les machines électriques produisant une énergie mécanique à partir d'une énergie électrique sont communément appelées des moteurs.
Cependant, toutes ces machines électriques étant réversibles et susceptibles de se comporter soit en « moteur » soit en « générateur » dans les quatre quadrants du plan couple-vitesse[N 1],[1],[2],[3], la distinction moteur/générateur se fait « communément » par rapport à l'usage final de la machine.
Les moteurs rotatifs produisent une énergie correspondant au produit d'un couple par un déplacement angulaire (rotation) tandis que les moteurs linéaires produisent une énergie correspondant au produit d'une force par un déplacement linéaire.
En dehors des machines électriques fonctionnant grâce à l'électromagnétisme il existe aussi des machines électrostatiques et d'autres utilisant l'effet piézoélectrique.
Les transformateurs sont aussi classés comme des machines électriques[4],[5]. Ils permettent de modifier les valeurs de tension et d'intensité du courant délivrées par une source d'énergie électrique alternative, en un système de tension et de courant de valeurs différentes, mais de même fréquence et de même forme.
Historique
En 1821, après la découverte du phénomène du lien entre électricité et magnétisme, l'électromagnétisme, par le chimiste danois Ørsted, le théorème d'Ampère et la loi de Biot et Savart, le physicien anglais Michael Faraday construit deux appareils pour produire ce qu'il appela une « rotation électromagnétique » : le mouvement circulaire continu d'une force magnétique autour d'un fil, en fait la démonstration du premier moteur électrique.

En 1822, Peter Barlow[6] construit ce qui peut être considéré comme le premier moteur électrique de l'histoire : la « roue de Barlow » qui est un simple disque métallique découpé en étoile et dont les extrémités plongent dans un godet contenant du mercure qui assure le passage du courant. Elle ne produit cependant qu'une force juste capable de la faire tourner, ne lui permettant pas d'application pratique.
Le premier commutateur utilisable expérimentalement a été inventé en 1832 par William Sturgeon. Le physicien hongrois Ányos Jedlik en 1827 et le physicien prussien Moritz Hermann von Jacobi ont travaillé au développement du moteur électrique à courant continu sur le continent européen. Jacobi a développé le premier moteur électrique pratique à Königsberg en mai 1834. Le à Saint-Pétersbourg, il pilota un navire mû par son moteur électromagnétique d’une puissance de 220 W. Le bateau de Jacobi (de) naviguait à contre-courant sur la Neva avec une dizaine de passagers à bord : il put ainsi parcourir 7,5 km à une vitesse d'environ 2,5 km/h, ce fut également la première application pratique d'un moteur électrique[7].
Le premier moteur à courant continu fabriqué avec l'intention d'être commercialisé a été inventé par Thomas Davenport en 1834 puis breveté en 1837[8]. Ces moteurs n'ont pas connu de développement industriel à cause du coût des batteries à l'époque.
On doit la vérification pratique de la réversibilité des machines électriques au physicien italien Antonio Pacinotti en 1864[9].
En 1869, l'inventeur belge Zénobe Gramme rend possible la réalisation des génératrices à courant continu en imaginant le collecteur. Il améliore les premières versions archaïques d'alternateurs (1867) et devient célèbre en retrouvant le principe de l'induit en anneau de Pacinotti. En 1871, il présentera à l'Académie des sciences de Paris la première génératrice industrielle de courant continu, que l'on appela machine de Gramme.
En 1873, Hippolyte Fontaine, partenaire de Zénobe Gramme, réalise la première application industrielle de la transmission électrique des forces. Tout en démontrant à l'occasion de l'exposition de Vienne, la réversibilité de la machine de Gramme, il présente une expérience associant dynamo et moteur à courant continu, séparés par 2 km de fils électriques. Avant cette expérience décisive, l'énergie mécanique des cours d'eau devait être utilisée sur place, car intransportable sur de longues distances.
Le physicien Nikola Tesla dépose un brevet de « machine électrique-dynamo » en 1886 (publié en 1887)[10].
La paternité de la machine asynchrone est controversée entre trois inventeurs : en 1887, le physicien Nikola Tesla dépose un brevet sur la machine asynchrone (publié en 1888)[11],[N 2], puis en mai de l'année suivante cinq autres brevets. Pendant la même période Galileo Ferraris publie des traités sur les machines tournantes, avec une expérimentation en 1885, puis une théorie sur le moteur asynchrone en avril 1888[12]. En 1889, Michail Ossipowitsch Doliwo-Dobrowolski, électricien allemand d'origine russe, invente le premier moteur asynchrone à courant triphasé à cage d'écureuil qui sera construit industriellement à partir de 1891[13].
Machines tournantes
Machine à courant continu
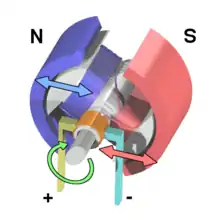
Comme toutes les machines tournantes, les machines électriques à courant continu sont constituées d'un stator et d'un rotor[14],[15]. Le stator crée une magnétisation longitudinale fixe à l'aide d'enroulements (inducteur) ou d'aimants permanents[14],[15]. Le rotor est constitué d'un ensemble de bobines reliées à un collecteur rotatif. Le collecteur rotatif permet de maintenir fixe la direction transversale de magnétisation du rotor lorsque celui-ci tourne. Grâce à ce dispositif, les magnétisations, rotorique et statorique, sont toujours décalées de façon optimale (en quadrature)[14],[15]. Ce décalage provoque un couple selon la loi du flux maximum (un pôle nord attire un pôle sud), provoquant ainsi la rotation du rotor.
L'avantage principal des machines à courant continu réside dans leur adaptation simple aux moyens permettant de régler ou de faire varier leur vitesse, leur couple et leur sens de rotation : les variateurs de vitesse. Voire leur raccordement direct à la source d'énergie : batteries d'accumulateurs, piles, etc.
Le principal défaut de la machine à courant continu réside dans l'ensemble balais/ collecteur rotatif qui s'use, est complexe à réaliser et consomme de l'énergie. Un autre problème limite les vitesses d'utilisation élevées de ces moteurs lorsque le rotor est bobiné, c'est le phénomène de « défrettage », la force centrifuge finissant par casser les liens assurant la tenue des ensembles de spires (le frettage).
Un certain nombre de ces inconvénients ont partiellement été résolus par des réalisations de moteurs sans fer au rotor, comme les moteurs « disques » ou les moteurs « cloches », qui néanmoins possèdent toujours des balais.
Les inconvénients ci-dessus ont été radicalement éliminés grâce à la technologie du moteur brushless, aussi dénommé « moteur à courant continu sans balais », ou moteur sans balais.
Moteurs sans balais
Un moteur sans balais, ou moteur « brushless », est un moteur synchrone[16], dont le rotor est constitué d'un ou de plusieurs aimants permanents et pourvu d'origine d'un capteur de position rotorique (capteur à effet Hall, synchro-résolver, codeur incrémental par exemple). Vu de l'extérieur, il fonctionne en courant continu. Son appellation Brushless vient du fait que ce type de moteur ne contient aucun balai. Par contre un système électronique de commande doit assurer la commutation du courant dans les enroulements statoriques[17]. Ce dispositif peut être soit intégré au moteur, pour les petites puissances, soit extérieur. Le rôle de l'ensemble capteur-électronique de commande est d'assurer l'auto-pilotage[18] du moteur c'est-à-dire le maintien de l'orthogonalité[18] du flux magnétique rotorique par rapport au flux statorique[18], rôle autrefois dévolu à l'ensemble balais-collecteur sur une machine à courant continu[18].
Les moteurs brushless équipent en particulier les disques durs et les graveurs de DVD de nos ordinateurs. Ils sont également très utilisés en modélisme pour faire se mouvoir des modèles réduits d'avions, d'hélicoptères et de voitures ainsi que dans l'industrie, en particulier dans les servo-mécanismes des machines-outils et en robotique[19].
Machines à courant alternatif
Pour les applications de faible et moyenne puissance (jusqu'à quelques kilowatts), le réseau monophasé standard suffit. Pour des applications de forte puissance, les moteurs à courant alternatif sont généralement alimentés par une source de courants polyphasés. Le système le plus fréquemment utilisé est alors le triphasé (phases décalées de 120°) utilisé par les distributeurs d'électricité.
Ces moteurs alternatifs se déclinent en trois types :
- les moteurs universels ;
- les moteurs asynchrones ;
- les moteurs synchrones.
Ces deux dernières machines ne diffèrent que par leur rotor.
Moteurs universels
Un moteur universel est un moteur électrique fonctionnant sur le même principe qu'une machine à courant continu à excitation série : le rotor est connecté en série avec l'enroulement inducteur. Le couple de cette machine indépendant du sens de circulation du courant est proportionnel au carré de son intensité. Il peut donc être alimenté indifféremment en courant continu ou en courant alternatif, d'où son nom. Pour limiter les courants de Foucault qui apparaissent systématiquement dans toutes les zones métalliques massives soumises à des champs magnétiques alternatifs, son stator et son rotor sont feuilletés.
Dans la pratique, ces moteurs ont un mauvais rendement, mais un coût de fabrication très réduit. Leur couple est faible, mais leur vitesse de rotation est importante. Quand ils sont utilisés dans des dispositifs exigeant un couple important, ils sont associés à un réducteur mécanique.
Ils sont principalement utilisés dans l'électroménager, par exemple les aspirateurs, l'outillage électroportatif de faible puissance (jusqu'à environ 1 200 W) et de nombreuses applications domestiques. On règle facilement leur vitesse de rotation avec des dispositifs électroniques peu coûteux tels que les gradateurs.
Machines synchrones

La machine synchrone est souvent utilisée comme génératrice. On l'appelle alors « alternateur ». Mis à part pour la réalisation de groupe électrogène de faible puissance, cette machine est généralement triphasée. Pour la production d'électricité, les centrales électriques utilisent des alternateurs dont les puissances peuvent avoisiner les 1 500 MW.
Comme le nom l'indique, la vitesse de rotation de ces machines est toujours proportionnelle à la fréquence des courants qui les traversent. Ce type de machine peut être utilisé pour relever le facteur de puissance d'une installation. On appelle celle-ci un « compensateur synchrone ».
Les machines synchrones sont également utilisées comme moteurs dans les systèmes de traction (comme la deuxième génération de TGV) ; dans ce cas, elles sont souvent associées à des onduleurs de courant, ce qui permet de contrôler le couple moteur avec un minimum de courant. On parle d'« autopilotage » (asservissement des courants statoriques par rapport à la position du rotor).
Machines asynchrones

La machine asynchrone, connue également sous le terme d'origine anglo-saxonne de « machine à induction », est une machine à courant alternatif sans alimentation électrique du rotor. Le terme anglais provient des courants induits dans le rotor par induction électromagnétique. Le terme « asynchrone » provient du fait que la vitesse de ces machines n'est pas forcément synchronisée avec la fréquence des courants qui les traversent.
La machine asynchrone a longtemps été fortement concurrencée par la machine synchrone dans les domaines de forte puissance, jusqu'à l'avènement de l'électronique de puissance. On la retrouve aujourd'hui dans de nombreuses applications, notamment dans le transport (métro, trains, propulsion des navires), de l'industrie (machines-outils), dans l'électroménager, etc. Elles étaient à l'origine uniquement utilisées en moteur mais, toujours grâce à l'électronique de puissance, elles sont de plus en plus souvent utilisées en génératrice par exemple dans les éoliennes.
En 2018, une équipe d'inventeurs bulgares dirigée par Alexander Hristov a développé une version plus efficace des moteurs asynchrones, dans laquelle la partie extérieure du rotor avec des enroulements électriques est séparée du noyau ferromagnétique[20]. La partie ferromagnétique intérieure du rotor est montée au moyen de roulements sur l'arbre du moteur et peut tourner séparément de la partie extérieure du rotor. Ainsi, la partie extérieure du rotor avec l'arbre tourne de manière asynchrone comme dans les moteurs asynchrones traditionnels, et la partie intérieure du rotor tourne de manière synchrone avec le champ magnétique généré par le stator, c'est-à-dire comme le rotor d'un moteur synchrone. De cette manière, cela réduit les pertes dues à la génération de courants de Foucault et à la magnétisation continue du noyau ferromagnétique du rotor.
Pour fonctionner en monophasé, ces machines nécessitent un système de démarrage[N 3], condensateur en série sur l'un des enroulements (P max. 6 kW) ou bague de démarrage (P max. 400 W). Les moteurs à bague de démarrage sont employés dans les hottes aspirantes, pompes de vidange de machine à laver et ventilateurs car le couple de démarrage est extrêmement faible. Pour les applications de puissance, au-delà de 6 kW, les moteurs asynchrones sont uniquement alimentés par des systèmes de courants triphasés.
Machines autosynchrones
Ce sont des machines synchrones dont le démarrage se fait en asynchrone et lorsque la fréquence de rotation est proche du synchronisme, le rotor s'accroche au champ statorique en se synchronisant sur la vitesse du champ magnétique.
L'autopilotage (contrôle de la fréquence statorique en fonction de la vitesse rotorique) tend à faire disparaître cette technologie.
Caractéristiques communes des machines à courant alternatif
Excepté pour le moteur de type universel, la vitesse de rotation des machines à courant alternatif est généralement liée à la fréquence des courants qui traversent ces machines.
Il existe une grande variété de moteurs hybrides (par exemple « asynchrone synchronisé » dans les pompes de lave-vaisselle).
Moteurs pas à pas

Un autre genre de moteur électrique est le moteur pas à pas. Un rotor interne contenant des aimants permanents est déplacé par un ensemble d'électroaimants placés dans le stator commutés par une électronique de puissance. L'alimentation ou non de chacun définit une position angulaire différente (l'enchaînement permet le mouvement). Les moteurs pas à pas simples ont un nombre limité de positions, mais les moteurs pas à pas à commande proportionnelle (alimentation variable des bobines) peuvent être extrêmement précis. On parle alors de « micro pas » puisque le moteur peut s'équilibrer entre deux pas.
Ces moteurs commandés par une électronique numérique sont une des formes les plus souples des systèmes de positionnement, en particulier dans les organes servocommandés numériquement : exemple, les moteurs de positionnement des têtes de lecture/écriture des disques durs d'ordinateur ont longtemps été positionnées par ce type de moteur, désormais trop lents pour cette application, ils ont été remplacés par des moteurs linéaires à impulsion beaucoup plus rapides.
Moteurs linéaires

Un moteur linéaire est essentiellement un moteur asynchrone dont le rotor a été « déroulé » de sorte qu'au lieu de produire une force de rotation par un champ électromagnétique tournant, il produise une force linéaire sur sa longueur en installant un champ électromagnétique de déplacement.
Machines électriques et environnement
L'empreinte environnementale des machines électriques peut être réduite et leur efficacité énergétique améliorée, dès la conception (emploi de matériaux d'origine végétale, réduction de l'utilisation de solvants, emploi de tôles et de roulements de meilleure qualité, etc.)[21]. Leur recyclage ou réutilisation en fin de vie peuvent en outre être améliorés par l'écoconception[21].
L'impact environnemental du moteur électrique dépend surtout de l'électricité qu'elle consomme. Ainsi, l'impact de son fonctionnement dépend de la façon dont est produite l'électricité qui l'alimente : avec de l'électricité bas carbone (renouvelables ou nucléaire) ou fortement émettrice de CO2 (charbon, gaz ou pétrole).
Dans le cadre de la transition énergétique et de la substitution des usages fossiles, les moteurs électriques peuvent remplacer les moteurs à explosion dans certaines applications, ce qui peut contribuer à diminuer les émissions de dioxyde de carbone[22]. Selon l'association Transport et Environnement une voiture électrique émet 77 % de CO2 en moins qu'une voiture thermique sur l'ensemble de son cycle de vie (fabrication, utilisation et recyclage)[23]. Cette diminution est d'environ 2/3 (66 %) pour la moyenne européenne[23].
Notes et références
Notes
- ↑ Les quadrants I à IV du plan couple-vitesse (dit des « quatre quadrants »), figurant dans l'article « Quadrant (mathématiques) », avec la vitesse en ordonnée et le couple en abscisse. Toutes ces machines électriques passent sans discontinuité du fonctionnement « moteur » au fonctionnement « générateur » par simple inversion du signe du couple (charge entraînée ou entraînante, par exemple pendant les phases d'accélération ou de freinage) ou du signe de la vitesse (inversion du sens de rotation).
- ↑ Voir histoire de l'électricité.
- ↑ Ces machines ne comportant qu'un seul enroulement statorique, le champ magnétique créé est un champ pulsant (se décomposant en deux champs tournants qui se déplaçant en sens opposés) s’annulant l'un/l'autre donc non tournant (les deux couples générés étant de même valeur et de sens opposés). Pour les démarrer, il faut donc les lancer ou avoir recours à un dispositif annexe.
Références
- ↑ Paul Landercy, « Le fonctionnement en quatre quadrants d’un entraînement à variation de vitesse » [PDF], sur assets.cdnsw.com, (consulté le ).
- ↑ Robert Chauprade, Commande électronique des moteurs à courant continu – À l'usage de l'enseignement supérieur, écoles d'ingénieurs, maîtrise, IUT, Paris, éd. Eyrolles, coll. « EEA », 1975, 243 p., p. 15-32 et 148-150.
- ↑ Robert Chauprade et Francis Milsant, Commande électronique des moteurs à courant alternatif – À l'usage de l'enseignement supérieur, écoles d'ingénieurs, facultés, CNAM, Paris, éd. Eyrolles, coll. « Ingénieurs EEA », 1980, 200 p., p. 79-92.
- ↑ Mikhail Kostenko et Ludvik Piotrovski, Machines électriques, t. I, Machines à courant continu, transformateurs, Éditions de Moscou (MIR), 1969, 3e éd., 1979, 766 p., « Deuxième partie – Transformateurs », chap. XII à XXII, p. 370-577.
- ↑ Charles Harel, Machines électriques et essais de Machines, Société française des électriciens – École supérieure d'électricité, Paris, 1960, chap. « Transformateurs », p. 118-180.
- ↑ (de) « Das Barlowsche Rad », sur uni-flensburg.de, Europa-Universität Flensburg – Institut für mathematische, naturwissenschaftliche und technische Bildung – Abteilung für Physik und ihre Didaktik und Geschichte, (consulté le ).
- ↑ (en) Karlsruhe Institute of Technology, « Jacobi's Motor : The first real electric motor of 1834 », sur eti.kit.edu (consulté le ).
- ↑ (en) Brevet U.S. 132
- ↑ Alfred Picard, Exposition universelle internationale de 1889 à Paris. Rapport général, vol. 7 : L'outillage et les procédés des industries mécaniques. L'électricité (suite) (groupe VI de l'Exposition universelle de 1889), p. 300Disponible en ligne sur le site du Conservatoire numérique des Arts et Métiers
- ↑ (en) « Dynamo-electric machine – US 359748 A », .
- ↑ (en) « Nikola tesla – US 382279 A », .
- ↑ (it) Museo Elettrico - Galileo Ferraris.
- ↑ « Histoire de l'électricité 1880-1889 », Association faîtière des entreprises électriques suisses.
- 1 2 3 Charles Harel, Machines électriques et essais de Machines, Société française des électriciens – École supérieure d'électricité, Paris, 1960, p. 3 et 8.
- 1 2 3 Mikhail Kostenko et Ludvik Piotrovski, Machines électriques, t. I-II, Éditions de Moscou (Mir), 1969 (réédité en 1979), 1348 p. ; t. I, p. 44-48.
- ↑ P. Zimmermann, « Electronically Commutated D.C. Feed Drives for Machines Tools », Robert Bosch GmbH – Geschäftsbereich Industrieaurüstung, Erbach, Germany, p. 69-86 in Proeeding of PCI Motorcon, septembre 1982, p. 72.
- ↑ P. Zimmermann, op. cit., p. 81.
- 1 2 3 4 P. Zimmermann, op. cit., p. 78-81.
- ↑ P. Zimmermann, op. cit., p. 69.
- ↑ (en) Alexander Iskrenov Hristov, Georgi Iskrenov Hristov et Plamen Iskrenov Hristov, Electrical Machine with an Auxiliary Movable Self-Directing Stator, (lire en ligne)
- 1 2 Walid Boughanmi, auteur d'une thèse soutenue le 30 novembre 2012 à Béthune (soutenue par EDF R&D et l'ADEME) dans le cadre du projet MEDEE 3 – (3E2D). Voir aussi article sur la présentation du « moteur vert » au salon EnviroNord 2012. « Éco-conception des motorisations électriques ».
- ↑ Arnaud Marchal, « Transport & Environment veut mettre fin à la rumeur des voitures électriques polluantes », sur Clubic.com, (consulté le )
- 1 2 « How clean are electric cars? », sur transportenvironment.org (consulté le )
Bibliographie
- Ch Harel, Machines électriques et essais de Machines, Société française des électriciens – École supérieure d'électricité, Paris, 1960.
- A. Fouillé, Électrotechnique à l'usage des ingénieurs. T.2, Machines électriques, Dunod, 1969.
- Mikhail Kostenko et Ludvik Piotrovski, Machines électriques, t. I-II, Éditions de Moscou (Mir), 1969 (réédité en 1979), 1348 p.
- M. Poloujadoff, Conversions électromécaniques : maîtrise d'EEA et C3 - Électrotechnique, Dunod, Paris, 1969.
- B. Saint-Jean, Électrotechnique et Machines électriques, Lidec - Eyrolles, , 373 p. (ISBN 0-7762-5651-3).
- P. Zimmermann, « Electronically Commutated D.C. Feed Drives for Machines Tools », Robert Bosch GmbH – Geschäftsbereich Industrieaurüstung, Erbach, Allemagne, dans Proceeding of PCI Motorcon, septembre 1982, p. 69-86.
- J.Chatelain, Machines électriques – Volume X du traité d'électricité, d'électronique et d'électrotechnique, Presse polytechnique romande – Éd. Georgi, 1983 ; réédité par Dunod, 1993.
- Francis Labrique, Ernest Matagne, Damien Grenier et Hervé Buyse, Électromécanique, convertisseurs d'énergie et actionneurs, Paris, Dunod, , 306 p. (ISBN 2-10-005325-6).
- Guy Seguier et Francis Notelet, Électrotechnique industrielle, Paris/Londres/New York, Tec et doc, , 552 p. (ISBN 2-7430-0791-5).
- François Martin (agrégé de physique appliquée à Strasbourg), Les différents types de moteurs électriques, Technosup (ISBN 9782340-043688), 2021, éditions Ellipses.
Annexes
Articles connexes
- Électricité
- Électroaimant
- Sustentation électromagnétique
- Magnétohydrodynamique (MHD)
Concepts physiques
- Force de Laplace
- Force électromotrice
- Énergie électrique
- Piézoélectricité
Machines
- Machine électrostatique
- Dynamo
- Machine à courant continu
- Machine synchrone
- Machine asynchrone
- Générateur électrique
- Voiture électrique
- Moteur universel
- Moteur pas à pas
- Moteur sans balais
- Moteur à aimants permanents
Inventeurs
- Peter Barlow
- Thomas Davenport
- Mikhaïl Dolivo-Dobrovolski
- Galileo Ferraris
- Paul-Gustave Froment
- Zénobe Gramme
- Marius Lavet
- Werner von Siemens
- William Sturgeon
- Nikola Tesla
Liens externes
- Moteur synchrone – Machine asynchrone triphasée – Machine à courant continu – Moteur pas à pas – Animation, sur sitelec.org (origine : académie d'Aix-Marseille)
- Le moteur électrique : animation, YouTube [vidéo]
- Bernard Multon, Historique des machines électromagnétiques et plus particulièrement des machines à réluctance variable [PDF]
- Bernard Multon, H. Ben Ahmed, N. Bernard et P.E. Cavarec, Les moteurs électriques pour applications de grande série [PDF], Revue 3E.I, juin 2000, p. 5-18
- Notice dans un dictionnaire ou une encyclopédie généraliste :