
في الهندسة والرياضيات، نظرية التحكم (أو نظرية الضبط) (control theory) هي النظرية التي تتعامل مع سلوك الأنظمة الديناميكية.[1][2][3] الخرج المطلوب المفضل للنظام يدعى المرجع reference. عندما تكون هناك حاجة لواحد أو أكثر من متغيرات الخرج للنظام أن يتبع مرجعا معينا مع الزمن، يقوم متحكم بمعالجة قيم الدخل للنظام للحصول على التأثير المطلوب على خرج النظام.
أنواع نظم التحكم الآلي
يمكن تقسيم نظم التحكم الآلي حسب شكل العقدة (الدائرة) إلى أنظمة تحكم مفتوحة العقدة (بالإنجليزية: open-loop control systems) وأنظمة تحكم مغلقة العقدة (بالإنجليزية: closed-loop control systems).
نظم التحكم المفتوحة
في نظم التحكم المفتوحة، يعمل المتحكم بشكل مستقل عن المخرجات. وكمثال على ذلك، يمكننا أن نفترض غلاية كهربائية تعمل فقط تحت تأثير عداد الزمن (بالإنجليزية: timer). في هذا النظام، تقوم الغلاية بتسخين الماء طالما لم يصل العداد إلى نهاية الزمن. وبالتالي تكون المدخلات لهذا المتحكم هي مخرجات العداد، والمخرجات للمتحكم هنا هي درجة حرارة الماء. تستمر الغلاية في التسخين حتى ولو وصلت درجة حرارة الماء إلى الغليان، طالما العداد لم يصل إلى نهايته. الشكل الموضح أدناه يوضح الغلاية الكهربية كمثال لنظام مفتوح:

في هذا النظام يكون المتحكم هو الغلاية، ومدخلات النظام هي قيمة العداد الزمني. أما المخرجات فهي الفعل (تسخين أو عدم التسخين). ودرجة حرارة الماء هي المتغير الذي يتم التحكم فيه.
نظم التحكم المغلقة
في نظم التحكم المغلقة، يعتمد عمل التحكم على المخرجات. وكمثال على ذلك، يمكننا أن نفترض أن الغلاية الكهربائية التي قمنا بعرضها أعلاه تم تعديلها بحيث تحتوي على ثرموستات يراقب درجة الحرارة، وعندما تصل درجة حرارة الماء إلى الغليان، تقوم الغلاية بفصل نفسها أوتوماتيكيا، حتى ولو لم يصل العداد إلى نهايته. في هذه الحالة فإن مدخلات المُتحكِم هي الفرق بين درجة الحرارة المطلوبة (وتسمى Set Point) ودرجة الحرارة الحالية (وتسمى التغذية الراجعة Feedback). الفرق بين القيمتين يسمى الخطأ (error)، وهدف المتحكم هو محاولة تقليل الخطأ لأقصى درجة. الشكل أدناه يوضح مثال الغلاية المعدلة كنظام تحكم مغلق:
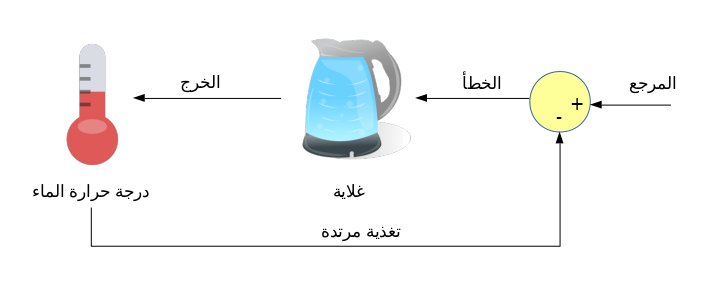
في هذه الحالة فإن المدخلات للمتحكم (الغلاية) هي الفرق بين القيمة الراجعة وقيمة التغذية المرتدة، وهو ما يسمى بالخطأ. والمخرجات هنا هي عمل الغلاية (تسخين أو عدم تسخين) ويعتمد على قيمة الخطأ ونوع المتحكم. ودرجة حرارة الماء هو المتغير الذي يتم التحكم فيه ويتم قياسه من خلال وصلة التغذية المرتدة.
التمثيل البياني لنظم التحكم
يتم استخدام رسومات الكتل (بالإنجليزية: block diagrams) أو رسم تدفق الإشارة (بالإنجليزية: signal flow graphs) لتمثيل نظم التحكم بيانايا
رسومات الكتل
وفيها يتم تمثيل كل مكون من مكونات النظام على شكل كتلة، ويتم الربط بين الكتل باستخدام الأسهم. يحمل كل سهم اسم متغير، ولكل كتلة سهم يعبر عن متغير الدخل input وسهم آخر يعبر عن متغير الخرج output. يمكن تمثيل نظام الغلاية المغلق الموضح أعلاه على شكل block diagram كما يلي (كمثال):

نلاحظ أنه تم تقسيم الغلاية إلى مكونين: المتحكم controller ومخرجه c دالة رياضية تعبر عن تشغيل المسخن heater أو إيقافه. أما ذراع التشغيل (بالإنجليزية: actuator) فهو يمثل المسخن heater نفسه. ويعمل ذراع التشغيل حسب خرج المتحكم، ويؤثر مباشرة في متغير الخرج y، والذي يمثل في هذه الحالة درجة حرارة المياه. أما المتغير x فهو يمثل درجة الحرارة التي نرغب في الوصول إليها (set point). والفرق بين x وy هو ما يسمى بالخطأ e وهو ما يؤثر على عمل المتحكم. في أنظمة أخرى ممكن أن يكون مثلا ذراع التشغيل هو ذراع يتحكم في محبس valve، ويعبر y وx عن تدفق المياه من خلال المحبس. ويقوم المتحكم بتحريك ذراع التشغيل لأعلى ولأسفل حسب إشارة الخطأ e، وعندها تمثل c مثلا قيمة القوة المؤثرة أو العزم المؤثر على الذراع، ويقوم بإيقاف حركة الذراع (بوضع c مساوية للصفر) إذا اقترب الخطأ من الصفر. نلاحظ أيضاً أن المتغيرات في الرسم كلها تعتمد على الزمن t.
رسم تدفق الإشارة
وفيها يتم تمثيل النظام على شكل عقد (بالإنجليزية: nodes) وفروع (بالإنجليزية: edges) تربط بينها. تمثل العقدة متغيرا، وتمثل الفروع معاملات خطية يتم ضربها في الفروع على حسب التدفق.
النمذجة الرياضية
كما لاحظنا أعلاه فإن متغيرات النظام في العادة تعتمد على الزمن، وبالتالي فهي دوال في الزمن. أما مثلا المتحكم فهو يعبر عن العلاقة بين دالة رياضية تعبر عن المدخل (وهي الدالة e) ودالة رياضية تعبر عن المخرج (وهي الدالة c)، وفي العادة تكون هذه العلاقة على شكل معادلة تفاضلية.
بالنسبة لنظم التحكم الخطية المستقلة زمنية Linear Time-Invariant Systems فإن المعادلة التفاضلية تكون معادلة تفاضلية خطية Linear Differential Equation على الصورة التالية:

وهي معادلة تفاضلية خطية من الدرجة n تعبر عن العلاقة بين متغير u (المخرج) ومتغير r (وهو المدخل)، وكلاهما متغيران في الزمن t. باستخدام تحويل لابلاس يمكننا التعبير عن المعادلة التفاضلية في مجال التردد كما يلي:

وبقسمة الطرفين على U:

وبقلب الكسر:

تسمى هذه العلاقة بدالة التحويل transfer function، وهي عبارة عن خارج قسمة متغير الخرج (U) على متغير الدخل (R) في مجال التردد (لابلاس). ويتم استخدام دالة التحويل transfer function للتعبير عن وظيفة مكون من مكونات النظام في مخطط الكتلة block diagram. فمثلا مخطط الكتلة الموضح أعلاه والخاص بالغلاية يمكن إعادة رسمه كالتالي:

في هذه الحالة فإن الدالة F تعبر عن دالة التحويل الخاصة بالمتحكم controller، والدالة G تعبر عن دالة التحويل الخاصة بذراع التشغيل actuator، وبالتالي فإن:

ويكون أيضاً:

والتعبير عن المتغيرات والدوال في مجال التردد يسهل التحليل الرياضي لرسومات الكتل للأنظمة المختلفة، كما يسهل تحليل استقرار النظام system stability analysis والتحليل في مجال التردد Frequency domain analysis.
دالة التحويل لنظام تحكم مغلق
يمكن اختزال مخطط الكتلة block diagram الخاص بنظام تحكم مغلق closed-loop control system على شكل كتلة block واحدة لها transfer function تعبر عن العلاقة بين متغير المدخل (set point) ومتغير المخرج (output variable). مثلا دعنا نفترض نظام التحكم العام التالي:

يمكن التعبير عن المتغير E بالمعادلة التالية:

أما المتغير Y فهو يكافئ:

وبالتعويض عن E باستخدام المعادلة الأولى:

وبالتوزيع وإعادة ترتيب المتغيرات:

الآن يمكننا ترتيب المعادلة لتصبح ع الصورة التالية

وهي معادلة تعبر عن العلاقة بين مخرج النظام Y ومدخل النظام X، وبالتالي فهي معادلة دالة التحويل transfer function التي تعبر عن النظام المرسوم أعلاه، ولهذا يمكن استبدال مخطط الكتلة أعلاه بكتلة واحدة تعبر عن دالة التحويل الخاصة بالنظام:

متحكمات التناسب والتكامل والتفاضل - PID
- مقالة مفصلة: عنصر تحكم تناسبي تكاملي تفاضلي
المتحكم التناسبي - نوعية P
العلاقة التي عن طريقها يعرف النظام من نوع P هي:
حيث: تمثل الخرج بينما الخطأ أو الدخل وKp ثابت يعرف بمقدار التناسب أو التكبير.
وهذه العلاقة يمكن التعبير عنها في مجال الترددات وذلك باستعمال تحويل لابلاس كما يلي:
وقد تم اختيار الحرف P لتسمية هذا النوع من الكونترولر للإشارة إلى أن المخرج proportional أي تناسبي أي تناسب المدخل والمخرج.




المتحكم التكاملي - نوعية I
العلاقة التي عن طريقها يعرف النظام من نوع I هي:
حيث: TI تمثل الميل أو زمن إعادة الضبط Reset.
وهذه العلاقة يمكن التعبير عنها في مجال الترددات وذلك باستعمال تحويل لابلاس كما يلي:
وقد تم اختيار الحرف I لتسمية هذا النوع من الكونترولر للإشارة إلى كلمة Integral أي أن نظام التحكم تكاملي


المتحكم التفاضلي - نوعية D
العلاقة التي عن طريقها يعرف النظام من نوع D هي:
حيث: TD تمثل المعدل Rate.
وهذه العلاقة يمكن التعبير عنها في مجال الترددات وذلك باستعمال تحويل لابلاس كما يلي:
وقد تم اختيار الحرف D لتسمية هذا النوع من الكونترولر للإشارة إلى كلمة differential ويجدر بالذكر أن الأنظمة السابقة لاتوجد منفردة (في حالات خاصة يمكن استعمال P فقط) وإنما خليط من نوع P مع I أو P مع I مع D. كذلك لايوجد تطبيق عملي للنوع P مع D.


النظم من نوع T
قبل كل شيء يجدر الإشارة إلى الفرق بين الأنظمة من نوع T والأنظمة التي تحوي في تسميتها صفة Ti حيث i ترمز لعدد فمثلا هناك PT1 ،DT1,PDT2 إلخ... أما أنظمة الT فهي مختلفة وهي أنظمة يكون مخرجها هو مساوي لمدخلها ولكن بعد مرور وقت معين
تعريفات
- مخزون التقوية مصطلح في نظرية التحكم وهو عبارة عن قيمة تعطينا فكرة عن كم يمكننا أن نزيد في تقوية نظام ما قبل أن نفقد خاصية الاستقرار في هذا النظام.
- مخزون الطور مصطلح في نظرية التحكم وهو عبارة عن قيمة تعطينا فكرة عن كم يمكننا أن نغير في طور نظام ما قبل أن نفقد خاصية الاستقرار في هذا النظام.
مقالات ذات صلة
- تقليص درجة النظم
- أتمتة Automation
- هندسة تحكم Control engineering
- نيكولاس مينورسكي
- متحكم Controller
- تغذية راجعة Feedback
- رسمة تدفق الإشارة Signal flow diagram
-lag compensator
- تحكم قوي
- سيرفو درايف
- محل الجذر Root locus
- تمييز النظام System identification
- نظرية الأنظمة Theory of systems
- نظرية التحكم المزدوج
- تجاوز الحد
مصادر ومراجع
- "معلومات عن نظرية التحكم على موقع mathworld.wolfram.com". mathworld.wolfram.com. مؤرشف من الأصل في 12 سبتمبر 2018.
- "معلومات عن نظرية التحكم على موقع d-nb.info". d-nb.info. مؤرشف من الأصل في 15 ديسمبر 2019.
- "معلومات عن نظرية التحكم على موقع cultureelwoordenboek.nl". cultureelwoordenboek.nl. مؤرشف من الأصل في 9 ديسمبر 2016.
- Åström, Karl J.; Murray, Richard M. (2008): Feedback Systems: An Introduction for Scientists and Engineers. Princeton University Press, Princeton, NJ,
- Franklin, Gene et al. (2010): Feedback Control of Dynamic Systems. 6th ed. Pearson/Prentice Hall, Upper Saddle River, NJ,
- Goodwin, Graham C. et al. (2001): Control System Design. Prentice Hall, Upper Saddle River, NJ,