Une identité trigonométrique est une relation impliquant des fonctions trigonométriques, vérifiée pour toutes les valeurs possibles des variables intervenant dans la relation.
Ces identités peuvent servir à simplifier une expression comportant des fonctions trigonométriques ou à la transformer (par exemple pour en calculer une primitive). Elles constituent donc une «boîte à outils» utile pour la résolution de problèmes.
Les fonctions trigonométriques sont définies géométriquement ou analytiquement. Elles servent beaucoup en intégration, pour intégrer des fonctions «non trigonométriques»: un procédé habituel consiste à effectuer un changement de variable en utilisant une fonction trigonométrique, et à simplifier ensuite l'intégrale obtenue avec les identités trigonométriques.
Notation: si ƒest une fonction trigonométrique, ƒ2 désigne la fonction qui à tout réel xassocie le carré de ƒ(x). Par exemple: cos2x = (cos x)2.
Relations entre fonctions trigonométriques
Les relations entre fonctions trigonométriques résultent d'une part des définitions
Note: Toutes ces formules sont également utilisables pour des ajouts d'angles, il suffit pour cela de prendre l'opposé: par exemple,. Il suffit ensuite d'appliquer la formule de simplification correspondante de la première colonne.
Périodicité, décalages
Décalage de π/2
Décalage de π (Période de tan et cot)
Décalage de 2π (Période de sin et cos)
Équations trigonométriques
Certaines des relations ci-dessus sont renforcées par les équivalences suivantes[2]:
Formules d'addition et de différence
Les deux formules principales sont les formules d'addition pour le cosinus et le sinus[3],[4]:
En remplaçant bpar son opposé, on obtient aussi les formules de différence[4]:
Démonstration géométrique des formules d'addition de cos(a+b) et sin(a+b)
Le moyen le plus rapide pour les démontrer est, à partir de la définition analytique du cosinus et du sinus, d'utiliser les formules d'Euler.
Il existe de nombreuses autres démonstrations possibles, utilisant les propriétés d'une corde dans un cercle, la relation entre cosinus d'un angle et produit scalaire (en évaluant de deux façons différentes le produit scalaire des vecteurs (cos a, sin a) et (cos b, sin b), la propriété du changement de repère ou encore la démonstration matricielle ci-dessous.
Démonstration matricielle
utilise l'expression de la matrice d'une rotation plane (dans une base orthonormée directe) en fonction du cosinus et du sinus de son angle :
La rotation vectorielle plane d'angle a + b est la composée des rotations d'angles a et b donc sa matrice est le produit des matricesRa et Rb :
.
Les formules s'obtiennent alors par identification.
On en déduit les formules d'addition et de différence pour la tangente et la cotangente. Par exemple pour l'addition[N 1]:
.
Exemple
.
Plus généralement, la tangente d'une somme de n angles[5] (resp. la cotangente) s'exprime en fonction des tangentes (resp. des cotangentes) de ces angles:
où les σk (pour 0 ≤ k ≤ n) sont les polynômes symétriques élémentaires. Pour n impair, il s'agit de la même fraction rationnelle; par exemple pour n = 3[N 2]:
Une autre conséquence intéressante de la formule d'addition pour sin est qu'elle permet de ramener la combinaison linéaire d'un sinus et d'un cosinus à un sinus:
où
si α est positif et sinon.
Formules de duplication et d'angle moitié
Formules de l'angle double
Appelées aussi «formules d'angle double», elles peuvent être obtenues, pour les deux premières[6], en remplaçant a et b par xdans les formules d'addition ou en utilisant la formule de Moivre avec n= 2. Les deux suivantes se déduisent de l'identité cos2x + sin2x = 1.
Formules de réduction du carré
Ces formules[7],[8] permettent d'écrire cos2x et sin2x, donc aussi tan2x, en fonction du cosinus de l'angle double:
Formules d'angle moitié
Démonstration
Les deux premières identités se déduisent des formules de réduction des carrés en remplaçant x par θ/2.
La troisième s'obtient en écrivantoù l'égalité finale vient des formules d'angle double.
La dernière (où sin θ est supposé non nul) se déduit de
Dans le cas de changement de variable en intégration, on ajoutera la relation [9]:
.
Ces formules permettent de simplifier des calculs trigonométriques en se ramenant à des calculs sur des fractions rationnelles. Elles permettent aussi de déterminer l'ensemble des points rationnels du cercle unité.
Formules de Simpson
Les égalités suivantes, du nom de Thomas Simpson, ont servi historiquement aux calculs en goniométrie.
Transformation de produits en sommes, ou linéarisation
(équivalente à la précédente par interversion de a et b).
Transformation de sommes en produits, ou antilinéarisation
(équivalente à la précédente en remplaçant q par –q).
Il suffit de remplacer a par p + q/2 et b par p – q/2 dans les formules de transformation de produit en somme. On en déduit une généralisation des formules de la tangente de l'angle moitié:
on a cos(nx) = Tn(cos x) et sin((n+1)x) = sin(x) Un(cos x).
Le polynôme Tn (resp. Un) est le n-ième polynôme de Tchebychev de première (resp. seconde) espèce.
Par exemple
.
La formule de Moivre permet aussi d'exprimer tan(nx) en fonction de tan x par la relation
.
Par exemple
.
Linéarisation
La linéarisation d'une expression cospx sinqx a pour but de l'exprimer comme combinaison linéaire de divers cos(nx) (si q est pair) ou sin(nx) (si q est impair) — par exemple pour en calculer une primitive. On peut utiliser soit les formules de transformation de produits en sommes ci-dessus, soit les formules d'Euler:
développer le produit des deux sommes obtenues (par distributivité),
simplifier les termes en utilisant que
puis les regrouper, sachant que
Si l'un des deux exposants p ou q est nul, en appelant « degré » la valeur de l'autre, on a:
Formules de linéarisation de degré 2 ou 3
Les formules de linéarisation de degré 2 sont les « formules de réduction du carré » vues plus haut.
Formules de linéarisation de degré quelconque
Calcul de sommes partielles de séries trigonométriques à coefficients constants
Les sommes et ont les expressions closes suivantes, pour :
.
On démontre ces formules en remarquant que et en utilisant les sommes de suites géométriques, ou en multipliant par et en linéarisant.
On en déduit que .
Pour , .
Ces formules permettent d'exprimer le noyau de DirichletDn , fonction définie par:
pour tout réel x,
Le produit de convolution de n'importe quelle fonction de carré intégrable et de période 2π avec le noyau de Dirichlet coïncide avec la somme d'ordre n de sa série de Fourier.
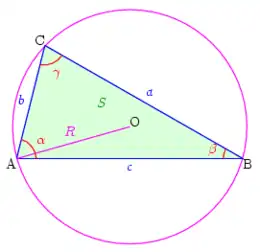
Fig. 1 - Notations usuelles dans un triangle quelconque.
Soit ABC un triangle, dans lequel on utilise les notations usuelles: d'une part α, β et γ pour les mesures des angles et, d'autre part, a, b et c pour les longueurs des côtés respectivement opposés à ces angles (voir figure ci-contre). Alors on a:
Formule des sinus
En notant de plus S l'aire du triangle et R le rayon de son cercle circonscrit (voir figure ci-contre), on a:
D'autre part, S est le produit du demi-périmètre p = a + b + c/2 par le rayon r du cercle inscrit.
Formule des différences des côtés
.
.
.
Relations entre les angles
En utilisant le fait que on obtient de nombreuses relations trigonométriques, dont par exemple:
Identités sans variable
Richard Feynman s'est rappelé toute sa vie cette curieuse identité, qu'il appelait loi de Morrie:
.
Une telle identité est un exemple d'identité qui ne contient pas de variable; elle s'obtient à partir de l'égalité:
.
Autres exemples:
Les facteurs 1, 2, 4, 5, 8, 10 sont les entiers inférieurs à 21/2 qui n'ont pas de facteur commun avec 21.
Ces exemples sont des conséquences d'un résultat de base sur les polynômes cyclotomiques; les cosinus sont les parties réelles des racines de ces polynômes; la somme des zéros donne la valeur de la fonction de Möbius en 21 (dans le tout dernier cas qui précède); seulement la moitié des racines sont présentes dans ces relations.
Dans cet article, on trouvera des identités faisant intervenir l'angle , comme
et dans celui-ci, des identités faisant intervenir l'angle , comme .
En analyse, il est essentiel que les angles qui apparaissent comme arguments de fonctions trigonométriques soient mesurés en radians; s'ils sont mesurés en degrés ou dans n'importe quelle autre unité, alors les relations reportées ci-dessous deviennent fausses.
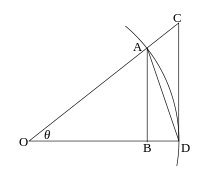
L'argument géométrique[11] consiste (cf. figure ci-contre) à encadrer l'aire d'un secteur circulaire du disque unité, d'angle θ = x, par celle de deux triangles :
l'aire du triangle OAD, contenu dans le secteur, vaut (sinθ)/2 ;
celle du secteur vaut par définition θ/2 ;
celle du triangle OCD, qui le contient, vaut (tanθ)/2.
La preuve analytique consiste à considérer un réel y (fourni par le théorème des accroissements finis) tel que
et à remarquer que
Cet encadrement est souvent utilisé; deux exemples en sont la méthode d'Archimède pour le calcul du nombre π (voir quadrature du cercle) et le problème de Bâle.
En changeant x en arctan x , on obtient:
En changeant x en arcsin x, on obtient:
Dérivées
Les dérivées de sin et cos peuvent se déduire l'une de l'autre par décalage de π/2. Elles sont:
Exemples de démonstrations
Si les fonctions trigonométriques sont définies géométriquement, on se convainc d'abord de l'encadrement ci-dessus, dont on déduit immédiatement (grâce au théorème des gendarmes)Cette limite permet de calculer les dérivées de sin et cos, à partir de la définition du nombre dérivé comme limite d'un taux d'accroissement, en transformant la différence en produit dans le numérateur de ce taux.
Si les fonctions trigonométriques sont définies analytiquement, alors les dérivées peuvent être obtenues en dérivant les séries entières terme à terme.
Les autres fonctions trigonométriques peuvent être dérivées en utilisant les identités précédentes et les règles de dérivation. Par exemple:
Primitives
Les identités sur les intégrales peuvent être trouvées dans la table des primitives de fonctions trigonométriques.
Notes et références
Notes
↑ Pour une démonstration du développement de tan(a + b), voir par exemple ce chapitre de la leçon « Trigonométrie » sur Wikiversité. Celui de cot(a + b) se démontre de même.
↑ Voir «Loi des cotangentes» pour une utilisation.
↑ Sous réserve que t soit différent de ±1, c'est-à-dire x ≠ π/2 + kπ.
↑ (en) Milton Abramowitz et Irene Stegun, Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables [détail de l’édition] (lire en ligne), p.73, 4.3.45.
↑ Arthur Adam et Francis Lousberg, Espace Math 5e/6e, De Boeck, (lire en ligne), p.144.
↑ Lionel Porcheron, Le formulaire MPSI, MP, Dunod, , 4eéd. (lire en ligne), p.178.
1 2 Dany-Jack Mercier, L'épreuve d'exposé au CAPES mathématiques, vol.2, Publibook, (lire en ligne), p.168.
↑ (en) Martin Erickson, Aha! Solutions, MAA, (lire en ligne), p.30-31.
↑ Collectif, Objectif Bac - Toutes les matières - Term STI2D, Hachette, (lire en ligne), p.18.
















































_et_Sin(a%252Bb).svg.png.webp)























































![{\displaystyle y=\arcsin x\Leftrightarrow x=\sin y\quad {\text{avec}}\quad y\in \left[{\tfrac {-\pi }{2}},{\tfrac {\pi }{2}}\right]}](https://img.franco.wiki/i/192bf56aafb6e6ed604843067b8f2547a2e342e8.svg)
![{\displaystyle y=\arccos x\Leftrightarrow x=\cos y\quad {\text{avec}}\quad y\in \left[0,\pi \right]}](https://img.franco.wiki/i/a3d9d3db1e04e3e7953bdaa78959e92e936be495.svg)
![{\displaystyle y=\arctan x\Leftrightarrow x=\tan y\quad {\text{avec}}\quad y\in \left]{\tfrac {-\pi }{2}},{\tfrac {\pi }{2}}\right[}](https://img.franco.wiki/i/dc606aec353fbd068c51946208c67c22c20eb524.svg)











































![{\displaystyle \forall x\in \left]0,\pi /2\right[\quad \sin(x)<x<\tan(x).}](https://img.franco.wiki/i/efe8c869738d0e27ee9c9c82cbe2791c2d678105.svg)



![{\displaystyle \forall x\in \left]0,1\right[\quad x<\arcsin x<{\frac {x}{\sqrt {1-x^{2}}}}.}](https://img.franco.wiki/i/f9b9da80d4d0a62f5b0b599103e0ab2baa92ab64.svg)






