Nota bene : articles détaillés :
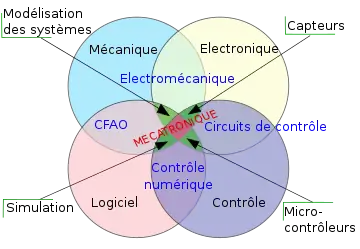
- Logiciel = instructions et données pour une machine.
- Contrôle = aptitude à diriger ou supprimer le changement.
- Électronique = branche de la physique appliquée aux usages de l'électricité
- Mécanique = branche de la physique appliquée à l'étude des mouvements, déformations et équilibres des systèmes physiques.
- CFAO = Conception et fabrication assistées par ordinateur.
- Contrôle numérique = Système numérique de contrôle-commande.
- Circuits de contrôle = Système analogique de contrôle-commande.
- Électromécanique = association de l'électronique et de la mécanique
- Simulation = Simulation de phénomènes
- Micro-contrôleurs = circuit intégré à haut degré d'intégration
- Capteur = convertisseur d'une grandeur physique
- Modélisation des systèmes = Conception assistée par ordinateur#Mécanique
La mécatronique est la combinaison synergique et systémique de la mécanique, de l'électronique, de l'automatique et de l'informatique en temps réel. L'intérêt de ce domaine d'ingénierie interdisciplinaire est de concevoir des systèmes automatiques puissants et de permettre le contrôle de systèmes complexes.
Le terme mechatronics a été introduit par un ingénieur de la compagnie japonaise « Yaskawa Electric Corporation (en) » en 1969. Le terme mécatronique est apparu officiellement en France dans le Larousse 2005.
La norme NF E 01-010 (2008) définit la mécatronique comme une « démarche visant l’intégration en synergie de la mécanique, l’électronique, l’automatique et l’informatique dans la conception et la fabrication d’un produit en vue d’augmenter et/ou d’optimiser sa fonctionnalité »
Description
L'ingénierie de tels systèmes mécatroniques nécessite la conception simultanée et pluri-disciplinaire de 4 sous-systèmes :
- une partie opérative (squelette et muscle du système à dominante Mécanique et Électromécanique) ;
- une partie commande (intelligence embarquée du système à dominante Électronique et Informatique Temps Réel) ;
- une partie interface Machine/Machine (échange de données entre deux systemes distinct à dominante Électronique et Informatique de Réseaux) ;
- une partie interface Homme/Machine (forme géométrique et dialogue du système à dominante Ergonomique et Esthétique).
Une approche globale permet aussi de réduire les coûts, d'augmenter la fiabilité et la modularité.
La fiabilité
Les dispositifs mécatroniques sont utilisés pour piloter des systèmes et rétroagir pour s’adapter aux conditions variables de fonctionnement, pour surveiller leur état (sollicitation, fatigue…), réaliser leur maintenance… Ce domaine très vaste reste complexe (accès aux informations, compétences en électronique et mécanique, répartition des fonctions, fiabilité et sécurité…). Il nécessite des moyens importants et entraîne des coûts élevés.
L’intégration de ces techniques a débuté dans l’aéronautique, suivie par les transports et actuellement l’automobile. Dans le futur, ce thème intéressera des secteurs de la mécanique comme les machines, le levage, etc. Les applications industrielles devront à terme faire partie du savoir-faire spécifique de l’entreprise, l’intégration des capteurs restant toujours le problème du mécanicien. La tendance est au partenariat technologique ; seuls certains grands ensembliers considèrent cette technologie comme totalement stratégique.
Bien que la fiabilité et la sécurité de l’électronique se soient améliorées, une réflexion globale sur le système ou le processus est nécessaire avant d’intégrer la technologie et les spécificités « métier ». Les appareils et systèmes doivent résister aux interférences électromagnétiques dans des environnements toujours plus perturbés et leur compatibilité électromagnétique doit être étudiée puis validée pour assurer la sécurité et la fiabilité du fonctionnement. Des méthodes de vérification du logiciel système ou utilisateur doivent être développées pour s’assurer que la commande répond bien aux besoins et n’entraîne pas des situations dangereuses.
Les outils de simulation de systèmes et d’automatismes font partie des solutions permettant de définir une stratégie de commande indépendante des défaillances mécaniques, électroniques ou de l’utilisateur.
Les développements futurs se dirigent vers les réseaux neuronaux et les boucles d’asservissement en logique floue.
Les contraintes de mise en œuvre
Transversalité
La mécatronique exige de penser les produits et les procédés de manière transverse. La mécatronique fait « éclater les murs », avec un pilotage matriciel. Le pilotage au plus haut niveau de l’entreprise est dans ce cadre essentiel, afin que les moyens alloués correspondent aux besoins à mettre en œuvre.
Le chef de projet doit maîtriser les différents domaines, et non être un expert dans l'une des technologies mécatronique : Il faut absolument éviter de regarder le projet avec un œil de mécanicien ou d’électronicien. Le pilotage est ici, plus qu’ailleurs, le rôle d’un chef d’orchestre et non d’un virtuose.
Non-séquentialité
La conception ne doit plus se faire de manière séquentielle : la démarche mécatronique nécessite de penser le produit dans son ensemble (tous les domaines de compétences à la fois) et non pas en séparant la partie mécanique, puis l’électronique, puis les capteurs-actionneurs puis l’informatique, au risque d’atteindre des surcoûts rédhibitoires.
Intégration
Les phases d'intégrations sont délicates, par exemple celle d'un montage électronique dans un atelier de mécanique (ou réciproquement). Il y a ainsi télescopage de domaines de maîtrise d'œuvre et de compétence, ce qui implique un travail qui se réalise en commun, pour obtenir finalement non pas un élément purement mécanique, ou purement électronique, mais bien un ensemble qui combine les avantages des deux, et ne pouvant plus être séparé.
Finalités
Les finalités peuvent être la réduction de coûts, le développement de nouvelles fonctions clients ou des moyens de se protéger de la contrefaçon. Elle ne doit pas être seulement l’électronisation de fonctions.
Un produit mécatronique a des potentialités importantes de par son « intelligence embarquée ». La création d’options peut se faire à coût marginal.
Applications
Comme exemples de systèmes mécatroniques, on peut citer :
- un véhicule automobile moderne ;
- un avion de chasse ;
- l'ABS, l'ESP ;
- la direction assistée ;
- une machine-outil à commande numérique ;
- l'autofocus ;
- les disques durs ;
- les roulements à billes instrumentés ;
- les machines à laver « intelligentes » ;
- la dronautique ;
- les pompes (à vide) turbomoléculaires sur paliers magnétiques, etc.
Les projets industriels
THESAME
THESAME est une association française qui fédère les entreprises, les formations et la recherche dans le domaine de la mécatronique. Plus de 1000 contributeurs animent cette communauté[1].
Tous les ans sont ainsi organisées les rencontres européennes de la mécatronique (EMM) : Annecy en 2003 et 2005, Paris en 2004, Saint-Étienne en 2006 et le Grand-Bornand en 2007.
L'édition 2008, construite comme un véritable « Davos de la mécatronique » s'est tenue les 20 et à nouveau au Grand-Bornand. Le thème : Europe Japon le défi mécatronique avec la collaboration des pôles de compétitivité Moveo, Arve Industries et de clusters automobile.
L'EMM 2009 s'est déroulée les 24 et à la Cité internationale universitaire de Paris.
EMM2010 a eu pour thème mécatronique et industrie, et EMM2011, organisé avec Innorobo était consacré aux liens entre robotique et mécatronique
EMM2012 (Grand-Bornand 6 et ) est la dixième édition ; elle a pour thème le développement durable et l'efficacité énergétique dans 4 secteurs : habitat, industrie, transport et nouvelles énergies. Le titre de la manifestation :« la mécatronique passe au vert ».
En 2012, Thésame a lancé un site collaboratif, totalement consacré à la mécatronique www.mecatronique.fr.
Eumecha-pro
Le projet européen Eumecha-pro s’est donné en particulier pour tâche d’élaborer les feuilles de route (roadmaps) pour l’industrie et la recherche. Les roadmaps industrielles vont fournir une vue structurée sur les attentes et des besoins de l’industrie et seront établies pour les différents secteurs d'équipement de production. Les roadmaps pour la recherche refléteront les visions et les capacités de la recherche européenne en mécatronique. À l’issue de ce travail, les roadmaps recherche et industrie seront intégrées dans une vision commune.
Les technologies émergentes et les approches de conception intégrées issues des roadmaps recherche seront confrontées aux besoins de l'industrie et indiqueront les nouvelles opportunités de développement industriel. D'autre part, les besoins industriels viendront alimenter la recherche pour qu’elle puisse répondre au mieux aux besoins du marché. En outre, les roadmaps recherche fourniront un cadre commun pour une coordination efficace des ressources de la recherche en Europe.
Eumecha-pro va promouvoir et diffuser la pratique dans l'industrie du nouveau paradigme qu’est la conception mécatronique. Les meilleures pratiques en conception mécatronique seront identifiées, promues et diffusées à travers des workshops à vocation industrielle.
Eumecha-pro va renforcer la structure et le cadre éducatif pour former les ingénieurs en mécatronique dont l’industrie a besoin. Les besoins et les approches en formation Mécatronique seront analysées, avec pour résultat une vision européenne sur la façon dont la formation peut être améliorée avec une bien meilleure cohérence au niveau européen.
La diffusion et l'échange d'information se fera en particulier sur internet, par des publications ainsi que par des réunions de réseau. En outre, Eumecha-pro va grandement améliorer la coordination des différents mécanismes de financement de la R&D, en particulier en insérant ses « déliverables » dans la plateforme « Eureka Factory » et l'initiative « MANUFUTURE » de la Commission européenne[2].
Groupement Mécatronique Languedoc Roussillon (GMLR)
GMLR[3] est le premier groupement régional d'entreprises du secteur mécanique et électronique en Languedoc-Roussillon. Créé en 2009 par 45 chefs d’entreprises, ce groupement est une association au service de l’ensemble de la filière mécanique et électronique de la région. Son ambition principale est de favoriser le développement et la croissance de l'ensemble de la filière, tant sur le plan de la compétitivité que sur celui de la performance commerciale des entreprises.
Notes et références
Bibliographie
- (en) R. Isermann, « Mechatronic systems: concepts and applications », Transactions of the Institute of Measurement and Control, vol. 22, , p. 29-55 (lire en ligne)
- Lionel Birglen, Mécatronique, Dunod, , 416 p. (ISBN 978-2-10-074478-7, lire en ligne)
- NF E 01-010 2008 - AFNOR
- XP E 01-013 2009 – AFNOR
- Mécatronique: notes de veille et exemples d'applications (CETIM)
- « SimFonIA Animation Tools » un outil pour l'animation de systèmes mécatroniques
- élèves ingénieur en mécatronique
Articles connexes
- Informatique industrielle
- Cybernétique
- Robotique
- Bond Graph
- Biomécatronique
Liens externes
- Notice dans un dictionnaire ou une encyclopédie généraliste :