Le programme Luna regroupe toutes les missions spatiales automatiques lancées par l’Union soviétique vers la Lune entre 1959 et 1976. Vingt-quatre sondes spatiales font officiellement partie de ce programme mais il y en eut en réalité 45 en tout. Quinze de ces missions ont atteint leurs objectifs. Dès le début, les considérations politiques visant à démontrer la supériorité du savoir-faire soviétique sur celui des États-Unis ont eu le pas sur les motivations scientifiques. Lorsque les enjeux de la course à l'espace disparaissent, le programme Luna prend fin tandis que les États-Unis orientent leur programme d'exploration principalement vers Mars et les planètes externes du système solaire.
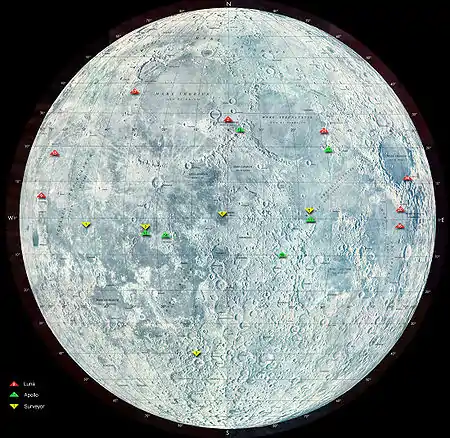
Le programme Luna est à l'origine d'un grand nombre de premières techniques dans l’exploration spatiale. Luna 1 lancé en 1959 est le premier engin spatial à s'affranchir de l'attraction terrestre tandis que Luna 2 (1959) est le premier objet artificiel à atteindre le sol lunaire. Luna 3 réalise la première photographie de la face cachée de la Lune (1959). Luna 9 (1966) est la première sonde à se poser en douceur sur la Lune, tandis que Luna 16 (1970) est le premier robot à ramener un échantillon lunaire sur Terre. Les missions Luna 17 (1970) et 21 (1973) emportent les premières astromobiles (rovers) qui vont parcourir plusieurs dizaines de kilomètres à la surface de la Lune. Sur le plan scientifique, même si beaucoup de questions importantes restent sans réponse à la fin du programme, le programme Luna comme les programmes homologues américains (programme Surveyor et Lunar Orbiter ainsi que le programme Apollo) ont beaucoup fait progresser notre connaissance de la Lune : composition du sol lunaire, topographie de la face cachée de la Lune, champ gravitationnel lunaire, évolution de la distance Terre-Lune, températures et niveaux de radiation…
Le programme a mis en œuvre des sondes spatiales de différents types (impacteur, orbiteur, atterrisseur, rover, retour d'échantillon). Celles-ci sont de plus en plus sophistiquées au fur et à mesure de l'avancement du programme, avec une masse croissant de 361 kg à près de 6 tonnes pour les rovers et les derniers orbiteurs. Plusieurs lanceurs ont été utilisés mais tous ont souffert de problèmes de fiabilité qui sont à l'origine d'une grande partie des échecs des missions Luna. Après la mission Luna 24 en 1976, l'Union soviétique et la Russie (qui a pris le relais du programme spatial soviétique) n'ont plus lancé aucune sonde vers la Lune pendant de longues décennies jusqu'à la reprise du programme et l'envoi de la sonde Luna 25 en 2023.
Contexte
Lancement du programme d'exploration lunaire
Le lancement du premier satellite artificiel, Spoutnik 1, a lieu en . Mais dès 1955, alors que le missile balistique intercontinental R-7 Semiorka, qui sera le premier lanceur de satellite, est encore en cours de mise au point, le futur responsable du programme spatial soviétique Sergueï Korolev envisage de lancer une sonde spatiale vers la Lune avec cette fusée. Il suffit selon ses calculs d'ajouter un étage supplémentaire au missile pour pouvoir lancer un engin spatial de quelques centaines de kilogrammes vers notre satellite naturel. Korolev rédige pour l'Académie des sciences d'URSS une proposition de plan d'exploration de la Lune en . Cette institution y répond favorablement [1]. Après le succès retentissant de Spoutnik 1, Korolev crée au sein de l'OKB-1 trois nouveaux bureaux d'études consacrés respectivement aux satellites de télécommunications, aux missions habitées et au développement de sondes spatiales à destination de la Lune. Cette dernière structure est placée sous la responsabilité de Mikhaïl Tikhonravov et de Gleb Maximov[2]. Par ailleurs, un programme comportant une série de missions lunaires de complexité croissante est élaboré par l'académicien Mstislav Keldych. Ce plan prévoit :
- un premier vol (Ye-1) qui doit s'écraser sur la Lune et doit ainsi contribuer à mettre au point les techniques spatiales (propulsion, pilotage) permettant d'atteindre notre satellite naturel;
- une mission qui doit photographier la face cachée de la Lune (Ye-3) ;
- une troisième mission (Ye-4) proposée par l'académicien Zeldovich qui consiste à faire exploser une bombe atomique à la surface de la Lune. Cette proposition est abandonnée après évaluation des risques en cas d'échec et des répercussions négatives au sein de la communauté scientifique ;
- Ye-5 qui doit effectuer un relevé photographique détaillé de la surface de la Lune ;
- Ye-6 qui doit couronner le programme avec un atterrissage en douceur et la transmission d'un panorama lunaire.
Cette liste est soumise à l'Académie des sciences et au dirigeant soviétique Khrouchtchev. Un décret formalise l'accord des autorités le . Pour remplir ce programme, Korolev doit ajouter un troisième étage à son lanceur R-7 Semiorka. Le fournisseur de moteurs-fusées attitré de Korolev, Valentin Glouchko, ne pouvant fournir dans les délais l'étage souhaité, il confie son développement à Sémion Kosberg, un nouvel arrivant dans le domaine des fusées, transfuge de l'aviation. L'ensemble formé par la Semiorka et le troisième étage «Bloc Ye»[N 1] reçoit le nom de code 8k72 mais est baptisée Luna dans les communiqués officiels[3].
Les sondes Luna
Les sondes du programme Luna, qui sont lancées entre 1959 et 1976, peuvent être regroupées dans 8 grandes familles aux caractéristiques très différentes. Celles-ci sont résumées ci-dessous :
| Modèle | Type | Premier lancement | Dernier lancement | Nombre missions /réussies | Lanceur | Masse | Charge utile | Résultats | Remarques |
|---|---|---|---|---|---|---|---|---|---|
| Ye-1 | Impacteur | 23/9/1958 | 12/9/1959 | 6/1,5 | Luna | 361,3 kg (Ye-1), 390,2 kg (Ye-1A) | 5 instruments scientifiques | ||
| Ye-2A et Ye-3 | Orbiteur | 4/10/1959 | 19/4/1960 | 3/1 | Luna | 278,5 kg (Ye-2A) | 6 instruments scientifiques | ||
| Ye-6 | Atterrisseur | 4/1/1963 | 3/12/1965 | 11/0 | Molnia | 1422-1 552 kg | 2 instruments scientifiques | ||
| Ye-6M | Atterrisseur | 31/1/1966 | 21/12/1966 | 2/2 | Molnia-M | 1438-1 620 kg | 2 (Luna 9) puis 6 instruments scientifiques | ||
| Ye-6S et Ye-6LF | Orbiteur | 1/3/1966 | 7/4/1968 | 7/3 | Molnia-M | 1584-1 700 kg | 6 à 9 instruments scientifiques | ||
| Ye-8 | Rover | 19/2/1969 | 8/1/1973 | 3/2 | Proton-K | 5660-5 700 kg | 8 à 10 instruments scientifiques | ||
| Ye-8-5 | Retour échantillon | 14/6/1969 | 9/8/1976 | 11/3 | Proton-K | 5667-5 795 kg | 2 instruments scientifiques | ||
| Ye-8-LS | Orbiteur | 3/10/1971 | 29/5/1974 | 2/2 | Proton-K | 5 700 kg | 8 instruments scientifiques |
Premières missions interplanétaires et premiers succès (1958-1959)

La course à la Lune
Six missions destinées à s'écraser sur la Lune, dont deux réussies, sont lancées en 1958 et 1959 en utilisant le modèle de sonde Ye-1. Au printemps 1958, Korolev sait que les États-Unis, avec lesquels l'Union soviétique a entamé une course de prestige, préparent l'envoi d'une sonde vers la Lune au cours de l'été dans le cadre du programme Pioneer. Bien que le troisième étage, qui n'a jamais encore volé, ne soit pas parfaitement au point, Korolev fait préparer un lancement d'une sonde lunaire Ye-1 à la date prévue pour le lancement de la sonde américaine ; la trajectoire calculée par l'équipe soviétique est plus courte et la sonde de Korolev est assurée d'arriver avant la sonde américaine. Pour ce lancement comme pour tous les suivants, les Américains annoncent à l'avance la date tandis que les Soviétiques n'officialisent leurs lancements qu'après coup et seulement s'ils sont réussis. Les échecs soviétiques sont ainsi dissimulés accentuant l'impression de domination de l'astronautique soviétique durant les premières années de l'ère spatiale. Le , jour du lancement, le lanceur américain explose en vol. Korolev décide de reporter son propre lancement pour améliorer la fiabilité de son lanceur. Le premier lancement de la sonde lunaire soviétique a lieu le mais il échoue. Un problème de résonance entraine la désintégration du lanceur en cours de vol. Le jour de la deuxième tentative américaine, le , Korolev dispose d'un lanceur également prêt. Le troisième étage du lanceur de la sonde américaine Pioneer 1 est à nouveau victime d'une défaillance mais la fusée soviétique qui est lancée dans la foulée est de nouveau victime du phénomène de résonance. Le problème est corrigé et une troisième tentative est effectuée le . Le lancement échoue à nouveau à la suite d'une défaillance de la turbopompe injectant l'oxygène dans la chambre de combustion du troisième étage. Les Américains sont aussi peu chanceux avec leur lanceur puisque leurs deux tentatives des et échouent également[5].
Nouveau triomphe de l'astronautique soviétique
Lors de la quatrième tentative, le , le lanceur fonctionne jusqu'au bout et la sonde parvient enfin à s'arracher à l'orbite terrestre. Mais la trajectoire suivie n'est pas parfaite car l'arrêt du second étage, qui est radio-commandé, est déclenché trop tard. La sonde qui devait s'écraser sur la Lune passe à 5 965 km de distance et se trouve placée sur une orbite héliocentrique. C'est donc un demi-succès pour l'équipe de Korolev mais les autorités soviétiques s'empressent néanmoins d'annoncer que la sonde a parfaitement rempli ses objectifs en réalisant trois premières : s'arracher à l'orbite terrestre, survoler à faible distance la Lune, et se placer sur une orbite héliocentrique. La sonde est sur le moment baptisée Mechta (rêve en russe) mais sera renommée un an plus tard Luna 1. Ses instruments permettent de découvrir le vent solaire. Aucun champ magnétique significatif d'origine lunaire n'est découvert et le flux de micrométéorites s'avère beaucoup plus faible que prévu. Deux mois plus tard, les Américains réussissent à leur tour à survoler la Lune (mission Pioneer 4). La sonde lunaire soviétique est légèrement modifiée (version Ye-1A) et est lancée le mais le lanceur est victime d'une défaillance d'un de ses gyroscopes. Le , le sixième tir qui emporte Luna 2 est un succès total. Pour la première fois, un engin construit par l'homme atteint la surface d'un autre corps céleste. La sonde s'écrase à l'est de la Mare Imbrium. Tous les instruments scientifiques ont parfaitement fonctionné et l'absence de champ magnétique lunaire significatif est confirmé. Khrouchtchev utilise cette nouvelle preuve de la supériorité de la technique soviétique en offrant au président Eisenhower le , lors d'un séjour effectué aux États-Unis, une réplique de sphères ornées des symboles soviétiques qui se sont écrasées sur la Lune avec la sonde[6].
Caractéristiques techniques des sondes spatiales Ye-1
Les sondes de la série Ye-1 reprennent la forme sphérique des premiers satellites Spoutnik avec un diamètre plus important (80 cm au lieu de 56 cm) et une masse quatre fois plus élevée (361,3 kg pour Luna 1). La coque extérieure est réalisée dans un alliage d'aluminium et de magnésium. Plusieurs antennes et capteurs d'instruments scientifiques sont fixés sur la surface de la sphère parfaitement polie. La sonde ne dispose d'aucun moyen de propulsion et est stabilisée par rotation avec une vitesse de 1 tour toutes les 14 minutes. L'intérieur de la sphère est rempli d'azote pressurisé à 1,3 bar ; un ventilateur brasse le gaz pour le maintenir à une température comprise entre 20 et 25 °C en exploitant la présence de sources de chaleur (l'électronique embarquée) et de froid (la face de la sonde située à l'ombre). L'énergie est fournie par des batteries zinc-argent. Un émetteur/récepteur radio transmet les télémesures et scientifiques en bande métrique avec un débit de 1 kilobit par seconde. La sonde dispose d'un émetteur de secours fonctionnant en ondes courtes. La charge utile comprend :
- un magnétomètre tri axial ;
- un détecteur de rayons cosmiques par effet Tcherenkov ;
- un détecteur de micrométéorites utilisant l'effet piezoélectrique ;
- des détecteurs d'ions du vent solaire ;
- des compteurs Geiger (sous-série Ye-1A uniquement).
Par ailleurs, le troisième étage du lanceur embarque une charge de sodium qui est libérée dans la magnétosphère à très haute altitude[7].
La face cachée de la Lune dévoilée (1959-1960)
.JPG.webp)
_(5586349520).jpg.webp)
Trois sondes de la série Ye-2 et Ye-3 sont lancées par l'Union Soviétique en 1959 et 1960 pour photographier la face cachée de la Lune. : lancement de Luna 3. Le 7 octobre, la sonde Luna 3 transmet les premières images de la face cachée de la Lune, qui ne peut jamais être vue depuis la Terre.
Caractéristiques techniques des orbiteurs Ye-2 et Ye-3
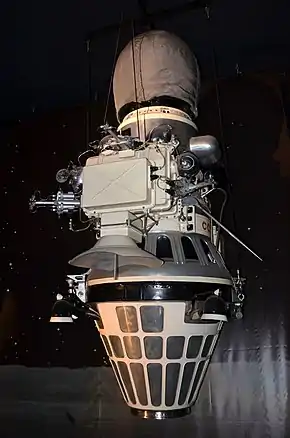
La sonde Ye-2 est beaucoup plus sophistiquée que le modèle Ye-1. Elle comporte un système de contrôle d'attitude qui lui permet de conserver son orientation dans un référentiel céleste dans une direction donnée : ce dispositif est nécessaire pour pouvoir maintenir l'objectif de la caméra tourné vers la Lune durant les prises de vues. Le système comprend des cellules photoélectriques détectant la présence de la Lune et du Soleil, des gyroscopes pour mesurer les mouvements et des propulseurs à gaz froid pour effectuer les corrections d'orientation. La sonde est stabilisée par rotation durant la majorité de son trajet mais stabilisée sur ses 3 axes durant les prises de photo. La sonde Ye-2 a la forme d'un cylindre de 95 cm de diamètre et de 120 cm de long avec deux extrémités en forme d'hémisphère et un renflement de 120 cm de diamètre près de l'une de ses extrémités. La partie cylindrique de la sonde est tapissée de cellules solaires. La sonde comporte 6 antennes omnidirectionnelles dont quatre sont fixées au sommet et deux à la base. L'intérieur de la sonde, rempli d'azote pressurisé à 0,23 bar et maintenu à une température inférieure à 25 °C grâce à un ventilateur et des radiateurs passifs, contient l'équipement électronique et en particulier la caméra et le système de développement des photos. La sonde ne dispose d'aucun système de propulsion lui permettant de corriger sa trajectoire. La charge utile comprend :
- un spectromètre de masse (il ne sera pas incorporé dans les sondes lancées) ;
- un détecteur de rayons cosmiques par effet Tcherenkov ;
- un détecteur de micrométéorites utilisant l'effet piezoélectrique ;
- des détecteurs d'ions du vent solaire ;
- des compteurs Geiger ;
- une caméra associée à un télécopieur.
Le modèle Ye-3, initialement Ye-2F, est une version du Ye-2 avec des performances améliorées au niveau du débit radio et de la qualité des images[8].
Les missions d'atterrissage en douceur (1963-1966)
.JPG.webp)
Développement d'un lanceur plus puissant
Ayant rempli les premiers objectifs fixés par la feuille de route définie initialement, Korolev a besoin d'un lanceur plus puissant pour les missions plus ambitieuses prévues vers la Lune mais également vers Mars et Vénus. Après consultation de l'Institut de mathématiques appliquées pour déterminer la meilleure configuration, le lanceur existant Luna est modifié : un troisième étage plus puissant est sélectionné (Bloc I) et un quatrième étage (Bloc L) est ajouté. Le nouveau lanceur, baptisé Molniya peut placer 1,5 tonne sur une orbite de transit vers la Lune et une tonne vers Mars. Le dernier étage peut être rallumé dans le vide mais cette innovation sera à l'origine d'un grand nombre de défaillances du lanceur. L'utilisation du nouveau lanceur est d'abord réservée à des missions vers Mars et Vénus dans le cadre des programmes Mars et Venera tandis que l'exploration de la Lune est mise en sommeil pendant près de 3 ans entre et [9].
Premier atterrissage en douceur sur la Lune
Le programme d'exploration de la Lune redevient une priorité avec les avancées du projet de mission habitée à destination de la Lune. Les soviétiques envisagent d'abord de lancer une sonde orbitale, baptisée Ye-5, pour répondre aux tentatives américaines dans le domaine avant de se tourner vers le développement d'une sonde capable d'alunir en douceur sur la surface lunaire (Ye-6) et un orbiteur lourd (Ye-7) utilisant les capacités de la fusée Molniya. La sonde Ye-6 exploite les avancées techniques de la dernière génération des sondes martiennes 2MV en matière d'architecture : séparation entre la plateforme et de la charge utile et le système de navigation. La nouvelle sonde n'est pas lancée vers son objectif mais est d'abord placée sur une orbite terrestre d'attente avant d'être propulsée vers la Lune par le quatrième étage du lanceur qui est rallumé. Pour que la sonde puisse faire un atterrissage en douceur sur la Lune, elle dispose d'un moteur capable d'annuler avec une grande précision sa vitesse juste avant d'arriver au niveau de la surface du sol lunaire. La partie de la sonde qui se pose sur le sol est conçue pour amortir le choc d'atterrissage puis fournir toutes les fonctions de support (énergie, protection thermique, transmission radio) permettant à l'instrumentation scientifique de fonctionner[10].
Le premier lancement de la nouvelle sonde est effectué le mais échoue lorsque le quatrième étage de son lanceur ne parvient pas à se rallumer en orbite terrestre. Onze sondes de la série Ye-6, dont quatre portées à la connaissance du public, Luna 4 à Luna 8, sont lancées entre et décembre 1965 mais aucune ne parvient à mener à bien la mission projetée : quatre sondes sont victimes de défaillance au lancement, deux d'une défaillance du quatrième étage du lanceur en orbite terrestre, la sonde est perdue dans deux cas durant le transit Terre-Lune tandis que trois s'écrasent à la surface de la Lune. C'est une période noire pour l'astronautique soviétique qui perd entre 1962 et 1965 26 sondes spatiales (en comptant les sondes martiennes et vénusiennes) sans enregistrer un seul succès. Fin 1965, Korolev transfère au bureau d'études Lavotchkine la responsabilité du programme des sondes spatiales. L'ingénieur Gueorgui Babakine, qui dirige le bureau, apporte deux modifications à la sonde rebaptisée à cette occasion Ye-6m : les airbags qui amortissent le choc à l'atterrissage sont désormais gonflés après la séquence de freinage et une nouvelle version du système de guidage est mise au point. La première tentative de lancement est un succès. La sonde Luna 9 lancée le se pose en douceur le à 18 h 44 min 52 s UTC et envoie les premières images panoramiques du sol lunaire. Les Soviétiques battent ainsi une fois de plus les Américains qui parviennent à poser Surveyor 1 le à la première tentative après avoir été longtemps retardés par les déboires de l'étage Centaur. La sonde soviétique parvient à réaliser et transmettre quatre panoramas avant que sa batterie, source unique d'énergie, ne s'épuise. Un deuxième atterrisseur du même modèle, Luna 10, est lancé le et parvient également à se poser en douceur[11].
Caractéristiques techniques des atterrisseurs Ye-6 et Ye-6M
Les sondes Ye-6 et Ye-6m sont pratiquement identiques. Chaque sonde a une hauteur de 2,7 mètres et comprend trois sous-ensembles dans le prolongement l'un de l'autre[12] :
- le système de propulsion principal repose sur un moteur-fusée Isaïev, de 4,64 tonnes de poussée et consommant des ergols hypergoliques, qui est chargé d'annuler la vitesse de la sonde avant l'atterrissage. Quatre petits moteurs de 245 newtons de poussée situés sur ses flancs sont utilisés pour le contrôle d'attitude durant la phase de descente ;
- le compartiment moteur est surmonté par un compartiment pressurisé contenant l'avionique et le système de télécommunications. Sur les flancs de ce module se trouvent deux sous-modules. L'un contient un radar-altimètre utilisé pour déclencher la mise à feu du moteur-fusée durant la descente ainsi que les moteurs chargés du contrôle d'attitude durant le transit Terre-Lune. Le second contient les capteurs chargés de déterminer l'orientation durant le vol ;
- au sommet se trouve l'atterrisseur proprement dit qui est une sphère de 58 cm de diamètre hermétiquement scellée et pesant 105 kg. Elle contient un système de télécommunications, un programmateur, un système de contrôle thermique, des batteries et des instruments scientifiques. La sphère est entourée de deux airbags gonflés durant la phase de descente qui la protègent du choc à l'atterrissage. Une fois sur le sol lunaire, la sphère s'ouvre en déployant 4 pétales et quatre antennes de 75 cm de long. Les batteries fournissent assez d'énergie pour 5 heures d'activité de la sonde sur une période de 4 jours. Les pétales déployables et un centre de masse décentré permettent de garantir que la sonde se pose avec la face supérieure dirigée vers le haut.
Les premiers orbiteurs lunaires soviétiques (1966-1968)

Le développement d'un orbiteur lunaire sous l'appellation Ye-7 avait débuté en même temps que celui de l'atterrisseur Ye-6 mais le projet avait avancé moins vite. Toutefois, les progrès du programme Lunar Orbiter américain, concurrent, donna un coup d'accélérateur au projet dont le premier exemplaire de sonde devait être lancé mi-1966. Les Soviétiques avaient également besoin à cette époque d'effectuer des reconnaissances photographiques pour préparer les missions spatiales habitées lunaires. À la suite de l'annulation de la mission de longue durée Voskhod 3 programmée pour célébrer avec éclat le 23e congrès du Parti communiste de l'Union soviétique en , la première mission d'un orbiteur lunaire fut choisie comme première spatiale de remplacement. Le modèle Ye-7 n'était pas prêt, aussi Gueorgui Babakine choisit de développer en moins d'un mois un orbiteur en réutilisant le modèle Ye-6 dont l'atterrisseur était remplacé par un module pressurisé emportant des instruments scientifiques déjà au point. Ce nouveau type de sonde fut baptisé Ye-6S. Après un premier échec au lancement le , Luna 10 fut lancé le et réussit à se placer en orbite lunaire devenant ainsi le premier satellite artificiel de la Lune. Les américains lancèrent leur premier orbiteur quatre mois plus tard. Après ce premier succès, les travaux sur le Ye-7 reprirent. Lorsqu'il fut décidé de réutiliser le module de propulsion du Ye-6, le nouveau module fut rebaptisé Ye-6 LF[13].
L'orbite de Luna 10 avait été sensiblement modifiée au cours de la phase opérationnelle de la sonde par les irrégularités non prévues de la gravité de la Lune. Il était indispensable pour la réussite du programme spatial habité lunaire soviétique de dresser une carte détaillée des variations du champ de gravité lunaire. Ce fut la mission assignée aux deux missions lunaires suivantes, Luna 11 et Luna 12, lancées avec succès respectivement le et le . Le modèle de sonde utilisé, modifié pour emporter de nouveaux instruments, fut baptisé Ye-6 LF. Luna 11 ne recueillit aucune information scientifique exploitable tandis que les données fournies par Luna 12 s'avérèrent d'une précision trop faible pour les besoins des futures missions. Une nouvelle version de la sonde baptisée Ye-6LS fut développée pour obtenir des données plus précises. Après deux échecs qui ne furent pas rendus publics, la sonde Luna 14 lancée le parvint à se placer en orbite et à mener sa mission avec succès[14].
Caractéristiques techniques des orbiteurs Ye-6S, Ye-6LF et Ye-6LS
Les trois types de sondes utilisés, Ye-6S, Ye-6LF et Ye-6LS, utilisaient le module de croisière des Ye-6 mais, alors que ce module était largué après la mise en orbite lunaire pour le type Ye-6S, les sondes de type Ye-6LF et Ye-6LS conservaient le leur ce qui leur permettait d'effectuer des ajustements de leur orientation pour les prises de photos. Les trois types de sonde présentaient la particularité de ne pas disposer de panneaux solaires : leur durée de vie opérationnelle reposait sur la quantité d'énergie disponible dans les batteries non rechargeables. La partie placée en orbite du Ye-6S avait une masse de 248,5 kg (1 584 kg en tout) pour une longueur de 1,5 mètre et un diamètre de 0,75 mètre. La sonde emportait 9 instruments dont 7 avaient été développés pour le projet Ye-7 abandonné par la suite mais était dépourvue de caméra : un magnétomètre fluxgate tri-axial placé au bout d'une perche de 1,5 mètre, un spectromètre à rayons X basses énergies, un spectromètre à rayons gamma, un compteur de décharges à gaz, des détecteurs d'ions du vent solaire, un radiomètre SL-1, un détecteur de micrométéorites, un radiomètre infrarouge et une expérience de cartographie du champ magnétique reposant sur le suivi de la trajectoire de la sonde[15].
Les sondes Ye-6LF et Ye-6LS pesaient avec leur module de croisière entre 1 620 et 1 700 kg pour une longueur totale de 2,7 mètres et un diamètre de 1,5 mètre. Le type Ye-6 LF emportait une série d'instruments scientifiques différents dont une caméra de type facsimilé en deux exemplaires qui avait été expérimentée dans le cadre de la mission Zond 3 l'année précédente. À l'altitude de la sonde, la caméra photographiait une surface de 25 km2 avec une résolution maximale de 15 à 20 mètres. Les autres instruments étaient un spectromètre à rayons X basses énergies, un spectromètre à rayons gamma, un radiomètre SL-1, des détecteurs de micrométéorites, un radiomètre ultraviolet destiné à mesurer les caractéristiques de la surface, une expérience de radio-astronomie en ondes longues, une expérience de cartographie du champ gravitationnel reposant sur le suivi de la trajectoire de la sonde et une expérience destinée à tester la lubrification des roues du futur rover lunaire Lunokhod. Le type Ye-6 LS était identique au Ye-6 LF mais il comportait un système de navigation plus précis permettant de mieux mesurer l'incidence des variations du champ de gravité lunaire ainsi qu'un système de communications radio expérimental destiné au programme spatial habité lunaire[16].
Les missions de retour d'échantillon (1969-1976)


Développement de la mission de retour d'échantillon
Fin 1968, les responsables de l'Union Soviétique constatent que le programme Apollo avance rapidement et que les américains pourraient réussir prochainement à déposer des hommes sur la Lune. Le programme concurrent développé par l'Union soviétique a par contre pris beaucoup de retard. Pour ne pas perdre tout le prestige acquis par l'astronautique soviétique grâce aux réussites des années 1960, en cas de réussite américaine, les soviétiques décident de développer en parallèle du programme spatial habité lunaire, une mission mettant en œuvre une sonde automatique qui a pour objectif de ramener un échantillon du sol de la Lune avant les astronautes de la NASA. La sonde comporte un étage de descente chargé d'atterrir sur la Lune et un véhicule de retour chargé de ramener l'échantillon. L'étage de descente est celui du rover Lunokhod en cours de mise au point (modèle Ye-8). L'objectif est difficile à atteindre car la masse totale de la sonde ne doit pas dépasser la capacité du lanceur lourd Proton 8K82K. Par ailleurs, il s'agit d'une mission qui nécessite de réussir à enchainer beaucoup de taches complexes et les ingénieurs soviétiques ne disposent que de quelques mois pour développer l'étage de retour, le système de prélèvement d'échantillon et la capsule qui doit revenir sur Terre. Pourtant, dès , un premier exemplaire est disponible pour l'envol. Le lanceur Proton a été optimisé pour porter sa capacité de lancement vers l'orbite lunaire de 5500 à 5 880 kg, poids final de la nouvelle sonde[17].
Premières tentatives infructueuses
La première tentative a lieu le mais le dernier étage du lanceur Proton ne parvient pas à s'allumer et la sonde retombe dans l'océan Pacifique. Le deuxième essai, Luna 15, est lancé le trois jours avant le lancement d'Apollo 11. La sonde se met en orbite autour de la Lune et entame sa descente vers le sol lunaire peu après que le module lunaire d'Apollo 11 en ait fait autant. Mais l'atterrissage se passe mal et la sonde s'écrase dans Mare Crisium (la mer des Crises). L'objectif principal de la mission ne pourra plus être rempli car Apollo 11 ramène quelques jours plus tard les premières roches lunaires sur Terre. Les trois tentatives suivantes qui ont lieu le , le et le sont toutes des échecs imputables au lanceur Proton[18].
Luna 16 : premier échantillon de sol ramené sur Terre
| Mission | Masse | Année |
|---|---|---|
| Luna 16 | 101 g | 1970 |
| Luna 20 | 55 g | 1972 |
| Luna 24 | 170 g | 1976 |
Luna 16 est en septembre 1970 la première sonde soviétique à se poser sur la Lune et à retourner des échantillons de sol lunaire vers la Terre (101 g).
Les autres missions de retour d'échantillon
Cinq autres missions du même type sont lancés entre 1971 et 1976 dont deux, Luna 20 et Luna 24 parviendront à ramener un échantillon du sol lunaire. Luna 24 est en août 1976 la dernière mission envoyée par l'Union Soviétique vers la Lune.
Caractéristiques techniques des sondes Ye-8
Les sondes de type Ye-8-5 comprennent un étage de descente surmonté d'un étage chargé de ramener la capsule contenant l'échantillon sur Terre. La masse totale de la sonde au départ de la Terre est de 5 880 kg.
L'étage de descente est pratiquement identique à celui qui avait été développé auparavant pour poser le rover Lunokhod sur le sol lunaire. Les différences portaient sur la suppression des rampes permettant au rover de descendre sur le sol lunaire et l'ajout du système de prélèvement d'échantillon de sol, pour les 8 premières missions d'une paire de caméras de télévision stéréo pour filmer le site d'atterrissage et un éclairage pour les atterrissages de nuit. Un compartiment toroïdal contenant l'instrumentation et l'avionique pour les opérations au sol remplaçaient les rampes d'origine et servait de support pour le lancement du véhicule de retour[19].
Le véhicule de retour est situé au-dessus de l'étage de descente. Cet engin de 520 kg (245 kg sans le carburant) est composé d'un compartiment d'équipement abritant l'avionique de forme cylindrique en position verticale perché sur les trois sphères contenant le carburant et le moteur-fusée principal. Celui-ci (KRD-61 Isayev) est du même type que le moteur de l'étage de descente mais sa poussée n'est pas modulable. Il brule un mélange d'acide nitrique et de UDMH et fournit une poussée de 18,8 kilonewtons durant 53 secondes qui génère un delta-V de 2,6 à 2,7 km/s suffisant pour échapper à l'attraction de la Lune[19].
La capsule contenant l'échantillon est la seule partie de la sonde qui revient sur Terre. C'est une sphère de 50 cm de diamètre pesant 34 kg recouverte d'un matériau ablatif qui protège son contenu de la chaleur au moment de la rentrée atmosphérique qui s'effectue à une vitesse de 11 km/s. La capsule subit une décélération allant jusqu'à 315 g. La capsule utilise un système de parachute pour annuler sa vitesse finale avant l'arrivée au sol : un parachute pilote d'une superficie de 1,5 m2 est suivi par le parachute principal de 15 m2[19].
Les rovers Lunokhod (1969-1973)



Contexte
Dès le début des années 1960, le bureau d'études de Sergueï Korolev avait commencé à étudier un véhicule automobile télécommandé capable de se déplacer à la surface de la Lune. Mais le projet de rover lunaire ne démarre réellement qu'en août 1964 lorsque les dirigeants de l'Union Soviétique décident de relever le défi américain du programme Apollo et de développer un Programme lunaire habité soviétique. Dans ce nouveau contexte le rôle assigné au futur rover lunaire est d'effectuer des opérations de reconnaissance pour préparer le débarquement des cosmonautes sur le sol lunaire. Le rover baptisé Lunokhod, c'est-à-dire marcheur lunaire en russe, est développé par la société Lavotchkine qui s'est associée pour le châssis au bureau d'étude de l'entreprise VNIITransmash de Leningrad spécialisée dans la fabrication des chars d'assaut pour l'Armée rouge[20]. Le rover est déposé sur le sol de la Lune par un atterrisseur. La sonde spatiale, constituée du rover et de l'atterrisseur, doit être lancée par une fusée Proton en cours de mise au point, surmontée d'un étage Bloc D chargé d'injecter l'engin vers la Lune[21].
Caractéristiques techniques
L'ensemble constitué par cet étage et le rover a une masse totale comprise entre 5 660 et 5 700 kg dont environ 800 kg pour le rover. Le rover est constitué par un châssis à 8 roues de 51 cm de diamètre sur lequel est montée une structure pressurisée en forme de marmite qui est recouverte d'un « couvercle amovible » servant de support aux cellules d'un panneau solaire et recouvrant un radiateur thermique. L'ensemble est haut de 1,35 m, long de 1,7 m (2,22 m au niveau des roues) et large de 2,15 m au niveau du couvercle. La partie pressurisée contient notamment l'avionique, l'électronique des instruments scientifiques et les batteries. Les capteurs des instruments scientifiques et plusieurs caméras utilisées entre autres pour le pilotage du rover sont fixés sur les flancs de la partie pressurisée. Des antennes de télécommunication font saillie sur le dessus. Le rover comporte une dizaine d'instruments scientifiques. Le rover est conçu pour résister à trois nuits polaires soit environ trois mois. Le rover qui peut franchir des pentes de 20 % est piloté par une équipe de cinq opérateurs qui depuis la Terre utilise les images fournies par les caméras de télévision pour envoyer des commandes avec un léger décalage[22].
L'atterrisseur prend en charge le transit entre la Terre et la Lune et réalise un atterrissage en douceur. Il comporte des rampes de débarquement qui sont utilisées par le rover, positionné au-dessus de l'atterrisseur, pour débarquer sur le sol lunaire. L'atterrisseur comporte un moteur-fusée unique dont la poussée peut être modulée entre 7,4 et 18,8 kilonewtons et deux ensembles de réservoirs dont l'un est largué avant d'entamer la descente. L'atterrisseur réalise des corrections de trajectoire durant le transit de la sonde entre la Terre et la Lune puis injecte la sonde sur une orbite dont le périgée se situe à 15 km au-dessus de la zone d'atterrissage. Arrivé au-dessus de celle-ci, il annule la vitesse orbitale puis effectue une descente verticale vers le sol lunaire sur lequel il se pose en douceur en réduisant la vitesse verticale au cours des 600 derniers mètres[23].
Toutes les sondes de ce type forment le modèle Ye-8 dans la nomenclature du programme Luna.
Les missions Lunokhod
Trois missions portant un rover Lunokhod ont été lancées. Le , la sonde portant le premier rover est victime d'une défaillance du lanceur Proton[24]. La deuxième mission n'a lieu que 20 mois plus tard car la priorité a été donnée aux missions de retour d'échantillon. Ce n'est qu'après la réussite d'une mission de ce type (Luna 16) qu'est lancé le le rover Lunokhod 1 dans le cadre de la mission Luna 17. La mission se déroule à la perfection et le rover réussit à parcourir 10,5 km sur une période de 10 mois en effectuant de nombreuses photos et relevés scientifiques[25]>. La mission Luna 21 embarquant le rover Lunokhod 2 est lancée le . Là encore la mission se déroule de manière nominale : le rover parcourt 37 km et survit durant 5 mois[26]. Un quatrième rover est construit mais il n'est finalement pas lancé.
- Lunokhod
 Panneau de contrôle de Lunokhod 1 (1).
Panneau de contrôle de Lunokhod 1 (1). Panneau de contrôle de Lunokhod 1 (2).
Panneau de contrôle de Lunokhod 1 (2). Gros plan sur les roues d'une maquette de Lunokhod 2.
Gros plan sur les roues d'une maquette de Lunokhod 2.
Les orbiteurs lourds (1971-1974)
Le modèle Ye-8 utilisé pour le rover lunaire et la sonde de retour d'échantillon a permis également de développer un orbiteur lourd. Ce modèle baptisé Ye-8LS est conçu dans le but d'effectuer des photographies à haute résolution de la surface de la Lune et d'étudier la composition de son sol en vue de sélectionner les sites d'atterrissage des missions habitées. Un deuxième objectif est de déterminer le niveau de radiation pour évaluer les risques courus par un équipage humain. Enfin, le suivi de l'orbite des sondes doit permettre d'affiner la cartographie du champ de gravité réalisée par Luna 14. Deux sont lancées et remplissent toutes deux leurs objectifs[27]. Luna 19, lancée le , réalise deux corrections de trajectoire les et puis se place le sur une orbite circulaire de 2 heures à 140 km d'altitude avec une inclinaison de 41°[28]. Son périgée est abaissé au bout de quelques mois pour effectuer des photographies de haute résolution. La mission est arrêtée le . Luna 22 est lancée le et se place sur une orbite légèrement elliptique de 219 x 221 km avec une inclinaison de 19,6°. De nombreuses corrections d'orbite sont effectuées au cours de la mission pour optimiser le fonctionnement des instruments. Le périgée est abaissé parfois jusqu'à 25 km pour prendre de meilleures photographies. Le , la réserve de carburant utilisée pour les corrections d'attitude est épuisée mais des contacts sporadiques sont maintenus par les équipes au sol jusqu'en [29].
Les caractéristiques techniques de l'orbiteur lourd Ye-8LS
Le modèle Ye-8 LS d'une masse de 5,7 tonnes utilise le module d'atterrissage du rover lunaire auquel est associé un module pressurisé en forme de cylindre aplati contenant les instruments scientifiques. La charge utile comprend notamment une nouvelle caméra à balayage linéaire permettant un champ optique de 180° avec une résolution de 100 mètres à une altitude de 100 km dans la direction du déplacement de la sonde et une résolution de 400 mètres perpendiculairement à celle-ci. Les autres instruments scientifiques étaient un spectromètre à rayons gamma destiné à mesurer la composition de la surface lunaire, un altimètre, un détecteur de micrométéorite, un magnétomètre, une expérience d'occultation radio, des détecteurs de radiation et une expérience de cartographie du champ gravitationnel reposant sur le suivi de la trajectoire de la sonde. Luna 22 emportait une caméra supplémentaire ainsi que des expériences technologiques destinées notamment à tester le comportement de lubrifiants dans l'espace[30].
Fin du programme lunaire soviétique
Les succès des rovers Lunokhod et des missions de retour d'échantillon entre et avaient poussé les médias soviétiques à spéculer sur les futures missions soviétiques. Parmi celles-ci figuraient[31] :
- des missions de retour d'échantillon du sol des régions polaires et des zones situées en altitude,
- des Lunokhod équipés de foreuses permettant d'obtenir des carottes qui seraient analysés dans un laboratoire embarqué,
- des Lunokhod chargés de collecter des échantillons de roches lunaires et de les ramener à des engins chargés de les ramener sur Terre,
- l'installation de télescopes sur la face cachée de la Lune,
- l'installation d'observatoires statiques automatiques à la surface la Lune,
- l'utilisation de satellites relais pour transmettre les données envoyées par des engins situés sur la face cachée de la lune.
Durant cette période des plans détaillés d'un rover collecteur baptisé Sparka sont réalisés. La société Transmash étudie un Lunokhod lourd de 4,7 mètres de long pour 4,3 mètres de large capable d'effectuer de très longs parcours. Mais ces spéculations prennent fin de manière abrupte en . À partir de cette date les rovers ne sont plus évoqués dans les médias que pour des missions martiennes. Les médias ne font plus que des comptes-rendus succincts du déroulement des missions lunaires postérieures à cette date (en se limitant aux missions réussies : Luna 22 et Luna 24). Ce changement de cap semble avoir été déclenché au cours de l'été 1973 par les responsables soviétiques qui auraient pris la décision de mettre fin au programme Ye-8 une fois que les sondes spatiales déjà assemblées à cette date aient été lancées. Toutefois Lunakhod 3 et Luna 25 pourtant achevées au moment de ce coup d'arrêt ne seront pas lancées et seront cédées au musée Lavotchkine. Lorsque la dernière mission Luna, Luna 24, ramène le 22 aout 1976 l'échantillon de sol sur Terre, aucune annonce officielle ne vient annoncer la fin du programme Luna[32].
Pour l'académicien Mstislav Keldysh, figure majeure de l'astronautique soviétique, l'URSS ne devait plus se laisser guider par la compétition avec les États-Unis dans la définition de sa stratégie d'exploration du système solaire. L'URSS devait se concentrer sur les domaines dans lesquels elle avait prouvé son expertise, c'est-à-dire l'exploration de Vénus. Au cours des deux décennies suivantes l'essentiel du programme d'exploration du système solaire se concentrera sur cette planète à travers les programmes Venera et Vega[33].
Reprise du programme (à partir de 2012)
Le retour sur la Lune de la Russie avait été décidé en 2012 à la suite de l'échec de la mission martienne Phobos-Grunt. L'objectif final du nouveau programme d'exploration lunaire dont les caractéristiques ont été figées en 2014 est de résoudre d'importantes questions scientifiques (origine et évolution de la Lune, caractéristiques des régions polaires, volatiles présents, exosphère et rayonnement) et de fournir les éléments indispensables (connaissances du terrain, ressources exploitables) aux futures missions avec équipage. Le programme d'exploration lunaire russe, tel qu'il a été défini en 2016, prévoit des missions robotiques de complexité croissante tenant compte du niveau de maitrise technique des ingénieurs russes et des contraintes budgétaires. À terme, le programme doit permettre l'installation d'observatoire de l'espace profond et du système solaire ainsi que des laboratoires scientifiques. Pour remplir ces objectifs, les missions robotiques suivantes sont prévues (projection effectuée en 2016)[34] :
- l'atterrisseur Luna-Glob (Luna 25) est un engin spatial léger qui doit effectuer une première analyse du régolithe lunaire dans les régions polaires jusqu'à une profondeur de 50 centimètres et collecter des données sur l'exosphère. Il doit également valider les techniques d'atterrissage et les systèmes de télécommunications qui seront mis en œuvre par les missions lunaires suivantes ;
- l'orbiteur Luna Resours (Luna 26) doit être placé sur une orbite polaire de 100 km. Sa mission est de cartographier l'ensemble de la Lune, d'analyser l'exosphère et le plasma autour de la Lune, d'identifier des sites d'atterrissage dans les régions polaires et de servir de relais de télécommunications pour les missions au sol. Sa date de lancement est prévue ver 2024 ;
- l'atterrisseur Luna Resours (Luna 27) est un engin plus lourd qui doit atterrir également dans la région du pôle sud. Il doit effectuer une analyse du régolithe lunaire jusqu'à une profondeur de 2 mètres et collecter des données sur l'exosphère. Sur le plan technologique, il doit valider une technique d'atterrissage de haute précision permettant d'éviter les obstacles au sol. Il doit mettre en œuvre une foreuse capable de préserver la température des carottes de terrain prélevées. Sa date de lancement est prévue vers 2025 ;
- la mission retour d'échantillon Luna Grunt (Luna 28) a pour objectif de ramener sur Terre des échantillons du sol lunaire dont la température a été préservée.
Résultats scientifiques du programme Luna
Sur le plan scientifique, même si beaucoup de questions importantes restent sans réponse à la fin du programme, le programme Luna, comme les programmes homologues américains, ont beaucoup fait progresser notre connaissance de la Lune. Les principales découvertes sont les suivantes[35] :
- la Lune n'a pas de champ magnétique mais se trouve sous l'influence du champ magnétique terrestre ;
- la Lune s'éloigne progressivement de la Terre au rythme moyen de 38 mm par an (informations recueillies par les rovers Lunokhod et les instruments du programme Apollo) ;
- découverte de la topographie de la face cachée de la Lune dont un énorme bassin autour du pôle sud ;
- le sol lunaire est dur et suffisamment résistant pour supporter des vaisseaux spatiaux et des rovers. Sa surface est recouverte de poussière et il faut disposer d'une puissance de traction suffisante pour progresser ;
- les températures au sol varient de manière extrême ;
- le niveau de radiation au sol permet à l'homme de survivre sauf durant les événements exceptionnels tels que les tempêtes solaires ;
- le champ gravitationnel lunaire varie plus fortement que sur Terre d'un lieu à un autre ce qui perturbe assez fortement l'orbite des sondes lunaires ;
- le sol lunaire est composé de roches basaltiques ;
- la Lune est entourée de poussière lunaire qui interfère avec les observations astronomiques effectuées depuis son sol ;
- le vent solaire a été découvert dans le cadre des missions lunaires ;
- l'environnement de la Lune est influencé par les pluies de météorites qui en rebondissant sur le sol lunaire peuvent toucher les sondes en orbite.
Liste des missions du programme Luna
Les dirigeants de l'Union Soviétique ont tout au long du programme spatial soviétique cultivé le secret et masqué autant que possible les mauvaises nouvelles. Le lancement d'une mission interplanétaire/lunaire n'est annoncé que lorsque la sonde est parvenue à s'arracher à l'attraction terrestre, et l'objectif précis, orbiteur, atterrissage, retour d'échantillon, n'est révélé par l'agence officielle Tass que lorsqu'il est réalisé[36]. Lorsque la mise en orbite terrestre échoue, le lancement n'est pas officialisé (noté dans le tableau ci-dessous avec une lettre en suffixe comme Luna 1A). Si la mise en orbite réussit mais que la sonde ne parvient pas à quitter l'orbite terrestre, la sonde est classée dans la famille des satellites Cosmos au programme vague (par exemple Cosmos 60). En conséquence, plus de la moitié des missions du programme Luna ne seront connues qu'après l'ouverture du régime soviétique dans les années 1990.
| Mission | Date de lancement | Type de mission | Modèle de sonde | Résultats |
|---|---|---|---|---|
| Luna 1A | 23/9/1958 | Impact lunaire | Ye-1 | Échec au lancement (1er étage) |
| Luna 1B | 11/10/1958 | Impact lunaire | Ye-1 | Échec au lancement (1er étage) |
| Luna 1C | 4/12/1958 | Impact lunaire | Ye-1 | Échec au lancement (2e étage) |
| Luna 1 | 2/1/1959 | Impact lunaire | Ye-1 | Échec partiel Survol de la Lune à une distance de 5 955 km |
| Luna 2A (en) | 18/6/1959 | Impact lunaire | Ye-1A | Échec au lancement (2e étage) |
| Luna 2 | 12/9/1959 | Impact lunaire | Ye-1A | Succès. Premier objet artificiel sur le sol de la Lune |
| Luna 3 | 4/10/1959 | Orbite circumlunaire | Ye-2A | Premières photos de la face cachée de la Lune |
| Luna 3A (en) | 15/4/1960 | Orbite circumlunaire | Ye-3 | Échec au lancement (dernier étage) |
| Luna 3B (en) | 19/4/1960 | Orbite circumlunaire | Ye-3 | Échec au lancement (1er étage) |
| Spoutnik 25 (en) | 4/1/1963 | Atterrisseur | Ye-6 | Échec. La sonde ne parvient pas à quitter l'orbite terrestre |
| Luna 4A (en) | 3/2/1963 | Atterrisseur | Ye-6 | Le lanceur ne suit pas la trajectoire programmée |
| Luna 4 | 2/4/1963 | Atterrisseur | Ye-6 | Échec. Survol de la Lune à une distance de 833 km |
| Luna 5A (en) | 21/3/1964 | Atterrisseur | Ye-6 | Le dernier étage lanceur ne parvient pas à atteindre l'orbite désirée |
| Luna 5B (en) | 20/4/1964 | Atterrisseur | Ye-6 | Le quatrième étage du lanceur ne s'allume pas |
| Cosmos 60 (en) | 12/3/1965 | Atterrisseur | Ye-6 | La sonde ne parvient pas à quitter l'orbite terrestre |
| Luna 5C (en) | 10/4/1965 | Atterrisseur | Ye-6 | Le dernier étage lanceur ne parvient pas à atteindre l'orbite désirée |
| Luna 5 | 9/5/1965 | Atterrisseur | Ye-6 | La sonde s'écrase sur le sol lunaire |
| Luna 6 | 8/6/1965 | Atterrisseur | Ye-6 | La sonde passe au large de la Lune à une distance de 159 000 km |
| Luna 7 | 4/10/1965 | Atterrisseur | Ye-6 | La sonde s'écrase sur le sol lunaire |
| Luna 8 | 3/12/1965 | Atterrisseur | Ye-6 | La sonde s'écrase sur le sol lunaire |
| Luna 9 | 31/1/1966 | Atterrisseur | Ye-6M | Premier atterrissage en douceur et première photo prise depuis la surface de la Lune |
| Cosmos 111 (en) | 1/3/1966 | Orbiteur | Ye-6S | La sonde reste bloquée sur l'orbite terrestre |
| Luna 10 | 31/3/1966 | Orbiteur | Ye-6S | Premier orbiteur, opérationnelle jusqu'au 30/5/1966 |
| Luna 11 | 24/8/1966 | Orbiteur | Ye-6LF | Opérationnelle jusqu'au 31/10/1966 |
| Luna 12 | 22/10/1966 | Orbiteur | Ye-6LS | Photos prises depuis l'orbite lunaire |
| Luna 13 | 21/12/1966 | Atterrisseur | Ye-6M | Répétition de la mission Luna 9 |
| Cosmos 159 (en) | 17/4/1967 | Orbiteur | Ye-6LS | Se place sur une mauvaise orbite terrestre |
| Luna 14A (en) | 7/2/1968 | Orbiteur | Ye-6LS | Défaillance du troisième étage du lanceur |
| Luna 14 | 7/4/1968 | Orbiteur | Ye-6LS | Cartographie détaillée de la lune, mesure du champ de gravité, test futur système de télécommunications |
| Luna 15A (en) | 19/2/1969 | Rover lunaire | Ye-8 | Problème avec la coiffe du lanceur |
| Luna 15B (en) | 14/6/1969 | Retour échantillon | Ye-8-5 | Échec au lancement (Block D du lanceur Proton K) |
| Luna 15 | 13/7/1969 | Retour échantillon | Ye-8-5 | La sonde s'écrase sur le sol lunaire |
| Cosmos 300 (en) | 23/9/1969 | Retour échantillon | Ye-8-5 | La sonde ne parvient pas à quitter l'orbite terrestre |
| Cosmos 305 (en) | 22/10/1969 | Retour échantillon | Ye-8-5 | La sonde ne parvient pas à quitter l'orbite terrestre |
| Luna 16A (en) | 6/2/1970 | Retour échantillon | Ye-8-5 | La sonde s'écrase sur le sol lunaire |
| Luna 16 | 12/9/1970 | Retour échantillon | Ye-8-5 | Un échantillon de sol de 101 g est ramené sur Terre |
| Luna 17 | 10/11/1970 | Rover lunaire | Ye-8 | Le rover Lunokhod 1 fonctionne jusqu'au 14/9/1971, parcourt 10,5 km |
| Luna 18 | 2/9/1971 | Retour échantillon | Ye-8-5 | Après mise en orbite lunaire le 6, la sonde s'écrase sur le sol lunaire le 11 septembre |
| Luna 19 | 28/9/1971 | Orbiteur | Ye-8LS | Fonctionne jusqu'au 3/10/1972 |
| Luna 20 | 14/2/1972 | Retour échantillon | Ye-8-5 | Un échantillon de sol de 55 g est ramené sur Terre |
| Luna 21 | 8/1/1973 | Rover lunaire | Ye-8 | Le rover Lunokhod 2 fonctionne jusqu'au 3/7/1973, parcourt 37 km. |
| Luna 22 | 29/5/1974 | Orbiteur | Ye-8LS | Fonctionne jusqu'au 2/9/1975 |
| Luna 23 | 28/10/1974 | Retour échantillon | Ye-8-5 | L'atterrissage le 6 novembre endommage la foreuse ; aucun échantillon n'est prélevé. |
| Luna 24A (en) | 16/10/1975 | Retour échantillon | Ye-8-5M | Échec |
| Luna 24 | 9/8/1976 | Retour échantillon | Ye-8-5M | Un échantillon de 170,1 g est ramené sur Terre |
| Luna 25 | 11/08/2023 | Atterrisseur | La sonde s'écrase sur le sol lunaire. | |
| Luna 26 | Prévu en 2024 | Orbiteur | ||
| Luna 27 | Prévu en 2025 | Atterrisseur | ||
| Luna 28 | Prévu en 2027 | Retour échantillon |
Notes et références
Notes
- ↑ Ye est la sixième lettre de l'alphabet cyrillique. Les cinq premières lettres sont associées à l'étage central et aux propulseurs d'appoint de la fusée Semiorka
Références
- ↑ Tchertok volume 2, p. 437 op. cit.
- ↑ Huntress et Marov 2011, p. 69-70.
- ↑ Tchertok volume 2, p. 439-440 op. cit.
- 1 2 Huntress et Marov 2011, p. 49-266.
- ↑ Huntress et Marov 2011, p. 75-76.
- ↑ Huntress et Marov 2011, p. 76-78.
- ↑ Huntress et Marov 2011, p. 73-75.
- ↑ Huntress et Marov 2011, p. 80-83.
- ↑ Huntress et Marov 2011, p. 88.
- ↑ Huntress et Marov 2011, p. 117-118.
- ↑ Huntress et Marov 2011, p. 118-120.
- ↑ Huntress et Marov 2011, p. 120-123.
- ↑ Huntress et Marov 2011, p. 152-153.
- ↑ Huntress et Marov 2011, p. 153-154.
- ↑ Huntress et Marov 2011, p. 154-157.
- ↑ Huntress et Marov 2011, p. 157-158.
- ↑ Huntress et Marov 2011, p. 215-218.
- ↑ Huntress et Marov 2011, p. 224-225.
- 1 2 3 Huntress et Marov 2011, p. 218-224.
- ↑ Siddiqi 1996, p. 529-530.
- ↑ Siddiqi 1996, p. 530-531.
- ↑ Huntress et Marov 2011, p. 191-193.
- ↑ Huntress et Marov 2011, p. 189-191.
- ↑ Huntress et Marov 2011, p. 195-196.
- ↑ Huntress et Marov 2011, p. 196-199.
- ↑ Huntress et Marov 2011, p. 199-200.
- ↑ Huntress et Marov 2011, p. 263.
- ↑ Le Progrès du 3 octobre 1971
- ↑ Huntress et Marov 2011, p. 265.
- ↑ Huntress et Marov 2011, p. 263-264.
- ↑ Harvey et Zakutnayaya 2011, p. 279-280.
- ↑ Harvey et Zakutnayaya 2011, p. 280-281.
- ↑ Harvey et Zakutnayaya 2011, p. 290-291.
- ↑ (en) Maxim Litvak, « Russian Lunar Exploration Missions », Roscosmos,
- ↑ Harvey et Zakutnayaya 2011, p. 201-203.
- ↑ Le Progrès du 3 septembre 1971
Sources
- (en) Brian Harvey, Soviet and russian lunar exploration, Berlin, Springer Praxis, , 317 p. (ISBN 978-0-387-21896-0 et 0-387-21896-3, lire en ligne).
- (en) Wesley T. Huntress et Mikhail Ya. Marov, Soviet robots in the Solar System : missions technologies and discoveries, New York, Springer Praxis, , 453 p. (ISBN 978-1-4419-7898-1, lire en ligne).
- (en) Boris Chertok, Rockets and People volume 2 creating a rocket industry, NASA History series, .
- (en) Boris Chertok, Rockets and People volume 3, NASA History series,
- (en) Brian Harvey et Olga Zakutnayaya, Russian space probes : scientific discoveries and future missions, Springer Praxis, (ISBN 978-1-4419-8149-3).
- (en) Andrew J. Ball, James R.C. Garry, Ralph D. Lorenz et Viktor V. Kerzhanovichl, Planetary Landers and entry Probes, Cambridge University Press, (ISBN 978-0-521-12958-9).
- (en) Asif A. Siddiqi, The soviet space race with Apollo, University Press of Florida, , 489 p. (ISBN 978-0-8130-2628-2).
Voir aussi
Articles connexes
- Lune
- Lunokhod
- Pioneer, Ranger et Surveyor programmes américains d'exploration de la Lune de la même époque
- Programme Apollo
Liens externes
- (en) Soviet Missions to the Moon - NASA