En physique, la loi de Hooke modélise le comportement des solides élastiques soumis à des contraintes. Elle stipule que la déformation élastique est une fonction linéaire des contraintes. Sous sa forme la plus simple, elle relie l'allongement (d'un ressort, par exemple) à la force appliquée. Cette loi de comportement a été énoncée par le physicien anglais Robert Hooke en 1676.
La loi de Hooke est en fait le terme de premier ordre d'une série de Taylor. C'est donc une approximation qui peut devenir inexacte quand la déformation est trop grande. Au-delà d'un certain seuil, la déformation peut aussi devenir permanente, ce qui invalide aussi la loi. En revanche, la loi de Hooke peut être considérée à toutes fins pratiques comme exacte quand les forces et les déformations sont suffisamment petites, aussi est-elle utilisée dans de très nombreux domaines de la physique et de l'ingénierie, tels que la séismologie, la mécanique moléculaire et l'acoustique.
Loi de Hooke pour les ressorts

Le mode de déformation le plus simple est la traction (étirement) ou la compression selon un axe. Pour de petites déformations, la variation de longueur est proportionnelle à la force de traction/compression générée par le ressort :



ce qui peut se réécrire :

où est la raideur de la pièce, aussi appelée constante de rappel. C'est en fait la loi des ressorts. Ici, le signe négatif signifie que la force s'oppose donc à toute déformation, et est donc de sens opposé à la déformation du ressort.

Équation du mouvement d'une particule soumise à la force de Hooke en dimension 1
L'équation différentielle qui traduit l'action de la force de Hooke sur la particule peut s'écrire :

où est la masse de la particule, est la position de la particule par rapport à son point d'équilibre (c'est-à-dire le point où il n'y a pas de force qui s'exerce sur la particule) et est l'accélération de la particule. Une solution de cette équation peut s'écrire :




où et sont des paramètres déterminés par les conditions initiales du système et représentent respectivement l'amplitude du mouvement et la phase. Ici, est la fréquence angulaire et vaut et n'est donc dictée que par les caractéristiques du système.




On reconnaît l'équation caractéristique de l'oscillateur harmonique. C'est en effet la loi de Hooke qui est à la base de ces oscillateurs.
Contrainte et module de Young
Afin de s'abstraire de la forme de la pièce, et notamment de ses dimensions, on divise la force par l'aire de la section droite de la pièce, on appelle ce ratio contrainte . La contrainte est une grandeur homogène à une pression et s'exprime en Pa.



et on divise l'allongement par la longueur initiale , grandeur que l'on appelle déformation ou allongement relatif (sans dimension)


- .

La loi de Hooke s'exprime alors sous la forme :

où est le module de Young ou module d'élasticité, une caractéristique du matériau ; c'est l'équivalent en mécanique des milieux continus de la raideur d'un ressort.

Cette loi est valable pour l'étirement ou la compression d'une pièce, les autres dimensions étant libres de s'étendre.
| Grandeur | Symbole | Unité SI | Autres unités usuelles |
|---|---|---|---|
| Contrainte | Pa | kPa, MPa, GPa | |
| Module de Young | Pa | MPa, GPa | |
| Déformation | 1 | %, ‰ |
Loi de Hooke généralisée
Si l'on s'intéresse à un petit élément de matière subissant de petites déformations, alors sa loi de déformation est linéaire et réversible quelle que soit la sollicitation. On peut donc généraliser la loi de Hooke, en l'exprimant sous forme tensorielle ou matricielle. Les contraintes et les déformations sont définies localement par deux tenseurs d'ordre 2 et de dimension 3, le tenseur des contraintes et le tenseur des déformations (de composantes et respectivement, avec et = 1, 2 ou 3), symétriques tous les deux ( et ).
![{\displaystyle [\sigma ]}](https://img.franco.wiki/i/0b4010240644efb51f43c642050f9d40fcdc70be.svg)
![{\displaystyle [\varepsilon ]}](https://img.franco.wiki/i/de5139270a1d58ba6553c9b2e829be9160f523ed.svg)






Cas général
Le comportement élastique du matériau est modélisé par un tenseur d'ordre 4 et de dimension 3 (de coefficients ), de telle sorte que la relation entre contraintes et déformations s'écrit :
![{\displaystyle [C]}](https://img.franco.wiki/i/798adf333080234dd9da202633a4d63c4ea091aa.svg)

![{\displaystyle [\sigma ]=[C]\cdot [\varepsilon ]}](https://img.franco.wiki/i/bcd959987155ab9b1c8d526978ac22b5e3ce4af6.svg)
ou, en appliquant la convention de sommation d'Einstein (sommation implicite sur les indices répétés) :

Le tenseur comporte 34 = 81 coefficients, mais :
- les tenseurs et étant symétriques, le tenseur vérifie les relations ;
- de plus, en supposant que le tenseur des contraintes peut être dérivé d'une énergie potentielle, on peut montrer que le tenseur des constantes élastiques est invariant par permutation des paires d'indices : .


L'existence de ces relations réduit le nombre de coefficients indépendants à 21. Il s'agit d'un nombre maximum, valable pour les réseaux cristallins sans symétrie autre que celle de translation (système réticulaire triclinique).
En ne considérant que les éléments indépendants de et , la relation peut s'écrire :


où la matrice 6×6 est symétrique : la matrice triangulaire supérieure comprend les 21 coefficients indépendants, les 15 termes restants étant symétriques par rapport à la diagonale.
Pour simplifier l'écriture, on adopte souvent une notation de 1 à 6, appelée notation de Voigt, où les axes de compression/traction (indices 11, 22 et 33) sont renumérotés de 1 à 3, et les axes de cisaillement (23, 13 et 12) de 4 à 6 :

où les 21 coefficients indépendants (matrice triangulaire supérieure) sont les éléments pour lesquels .


Matériau isotrope
Cas général
Dans le cas d'un matériau isotrope, si l'on reprend en compte le coefficient de Poisson , la loi de Hooke devient :


avec
- δij le symbole de Kronecker ;
- εkk la notation indicielle de la trace du tenseur des déformations (somme des termes diagonaux du tenseur).
On peut aussi écrire la loi sous forme matricielle :
- .

Les relations ci-dessus peuvent être inversées pour donner :
![\varepsilon _{{ij}}={\frac {1}{{\mathrm {E}}}}\left[\left(1+\nu \right)\sigma _{{ij}}-\nu \sigma _{{kk}}\delta _{{ij}}\right]](https://img.franco.wiki/i/81d5ee51be901443cc7375a16e8d14e989d9c432.svg)
ou, sous forme matricielle (en appliquant la trace à la relation plus haut) :

La forme explicite très simple de ces relations (donnant les déformations en fonction des contraintes)
![{\displaystyle {\boldsymbol {\varepsilon }}={\begin{pmatrix}\varepsilon _{11}={\frac {1}{\mathrm {E} }}\left(\sigma _{11}-\nu \left(\sigma _{22}+\sigma _{33}\right)\right)&\varepsilon _{12}={\frac {1+\nu }{\mathrm {E} }}\sigma _{12}&\varepsilon _{13}={\frac {1+\nu }{\mathrm {E} }}\sigma _{13},\\[0.5em]\cdots &\varepsilon _{22}={\frac {1}{\mathrm {E} }}\left(\sigma _{22}-\nu \left(\sigma _{11}+\sigma _{33}\right)\right)&\varepsilon _{23}={\frac {1+\nu }{\mathrm {E} }}\sigma _{23},\\[0.5em]\cdots &\cdots &\varepsilon _{33}={\frac {1}{\mathrm {E} }}\left(\sigma _{33}-\nu \left(\sigma _{11}+\sigma _{22}\right)\right)\\\end{pmatrix}}}](https://img.franco.wiki/i/2ee664e3e2618aa51a0be6002a23d72f067dbdb7.svg)
montre bien la signification physique du module de Young E et du coefficient de Poisson .
Cas des plaques
Source[1].
Dans le cas de la flexion des plaques (voir Théorie des plaques), on considère que la déformation ne se produit que selon les deux directions comprises dans le plan de la plaque (on définit le trièdre par : axes x et y dans le plan de la plaque et z est la direction de l'épaisseur).
En considérant la plaque fine, on suppose que : et (le reste de la matrice étant constitué de 0).


En reprenant la formule précédente : et l'appliquant au calcul de on obtient : (remarque : ce calcul s'applique aussi bien à et en faisant une permutation des indices).

![{\displaystyle \varepsilon _{xx}={\frac {1}{\mathrm {E} }}\left[\sigma _{xx}-\nu \left(\sigma _{yy}+\sigma _{zz}\right)\right]}](https://img.franco.wiki/i/30dcd81daf79b9bee9901f73344f9100cb81684d.svg)


Avec les hypothèses relatives aux plaques fines : , ou .


On retrouve alors la loi de Hooke, avec un module de Young modifié.
Ce module est classiquement noté et est appelé module biaxial (biaxial modulus en anglais).

Propriétés et justification
Deux aspects de la loi sont importants :
- la linéarité ;
- l'élasticité.
Ces deux aspects ne sont pas identiques, la linéarité exprime que l'allongement est proportionnel à la force, alors que l'élasticité exprime que cet effet est réversible et permet de revenir à l'état initial, tel un ressort soumis à de faibles forces. L'élasticité a une limite qui est indépendante de la notion de linéarité. Hooke n'a considéré que la phase élastique et linéaire, donc proportionnelle et réversible.
La linéarité provient du fait qu'en se plaçant dans le cas de faibles déformations, on peut faire une approximation linéaire de la loi réelle (développement limité au premier ordre). Il s'agit en fait d'approcher le potentiel interatomique par une parabole (voir l'article Déformation élastique).
Dans le cas d'une pièce de forme complexe, la loi de déformation globale n'a aucune raison d'être linéaire. Cependant, chaque élément infinitésimal de matière se déforme quant à lui de manière linéaire.
Loi similaire pour le cisaillement
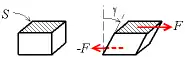
La loi de Hooke est une loi de déformation en traction/compression. Il existe une loi similaire pour le cisaillement :

où :
- est la cission (contrainte de cisaillement) ;
- est le module de cisaillement ou module de Coulomb, également noté μ ;
- est l'angle de déformation relative (écart à l'angle droit).



Histoire
Cette loi de comportement a été énoncée par Robert Hooke, par la phrase en latin :
ce qui signifie « telle extension, telle force », ou bien en termes modernes « l'allongement est proportionnel à la force ». Hooke désirait obtenir une théorie des ressorts, en soumettant ces derniers à des forces croissantes successives.
Ut tensio sic vis est la devise de Polytechnique Montréal.
Notes et références
- ↑ « DoITPoMS - TLP Library Coating mechanics - The biaxial modulus », sur doitpoms.ac.uk (consulté le ).
- ↑ Lectures De Potentia Restitutiva of springs, explaining the power of springing bodies, Londres, .
- ↑ L. Solomon, Élasticité linéaire, (lire en ligne).
Voir aussi
Articles connexes
- Module d'élasticité
- Plasticité et endommagement d'un polymère