| Hélicoptère | |
 Un Eurocopter H125 des forces aériennes de la Gendarmerie nationale française. | |
| Caractéristiques | |
|---|---|
| Type | Aéronef |
Un hélicoptère est un aéronef dont la sustentation et la propulsion sont assurées par une voilure tournante, couramment appelée rotor, et entraînée par un ou plusieurs moteurs.
La majorité des hélicoptères utilise un seul rotor de sustentation et un rotor ou autre dispositif anticouple, les autres solutions sont des bi-rotors contrarotatifs placés sur le même axe, sur deux axes convergents, en tandem ou côte à côte.
L'histoire de l'hélicoptère commence au début du XXe siècle mais les progrès sont nettement plus lents que ceux de l'avion. L'utilisation intensive des hélicoptères lors des guerres d'Algérie et du Viêt Nam et le développement des turbomachines marquent un tournant majeur pour apporter la preuve de ses capacités opérationnelles civiles ou militaires.
Comparé aux aéronefs à ailes fixes, l'hélicoptère est d'une conception plus complexe, sa maintenance est plus exigeante et le coût de l'heure de vol est plus élevé. Son aptitude à décoller et atterrir sur des terrains étroits et non préparés le rend indispensable pour certaines missions et fonctions malgré son autonomie et sa vitesse réduites.


Étymologie
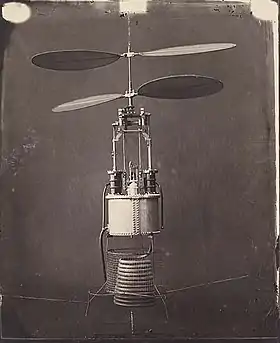
Le mot « hélicoptère » a été inventé par l'inventeur français Gustave de Ponton d'Amécourt[1],[2], à partir du grec ancien « έλιξ, έλικος » ou « helix » (« spirale », « hélice ») et « πτερὸν » ou « pteron » (« aile »). Ce terme est apparu pour la première fois le dans une demande de brevet au Royaume-Uni, puis le dans un certificat d'addition au brevet 49.077 initialement déposé le en France ne mentionnant que le terme « aéronef ». Cet inventeur construisit avec Gabriel de La Landelle un petit prototype d'hélicoptère (ou chère hélice) à moteur à vapeur bicylindre, à rotor contrarotatif, dont la chaudière fut une des premières utilisations de l'aluminium.
Histoire
L'histoire de l'hélicoptère commence au début du XXe siècle, comme pour l'avion. Mais l'insuffisance de la puissance des moteurs et les problèmes de stabilité rendent les développements beaucoup plus longs et aléatoires. En dehors de la parenthèse des autogires, l'hélicoptère parvient à prouver son efficacité potentielle au cours de la Seconde Guerre mondiale. Le premier hélicoptère totalement contrôlable a été le Breguet Dorand Gyroplane-Laboratoire à double rotor contrarotatif de 1935[3], mais le premier hélicoptère réellement viable fut le Focke-Wulf Fw 61 de 1936. Les scientifiques du IIIe Reich ont mis au point, en 1945, des hélicoptères opérationnels, et ont montré leur potentiel en missions de reconnaissance et de sauvetage, mais ces derniers resteront très peu employés. Les guerres menées dans les années 1950 par la France, en Indochine, en Algérie, et les États-Unis, en Corée puis au Viêt Nam dans les années 1960/1970, démontreront son intérêt militaire pour les missions de pénétration, d'appui-feu, de lutte anti-chars et pour le secours des blessés.
Sur le plan technique c'est l'apparition des turbomachines permettant le développement d'appareils plus lourds, plus rapides et plus fiables, qui donne à l'hélicoptère une place importante au sein des forces armées, de police, de sécurité civile, et de douane de beaucoup de pays. Sur le plan civil, en raison du coût très élevé de l'heure de vol et de la maintenance, seuls quelques privilégiés, et quelques opérations cruciales[4], profitent de ce moyen de transport et de manutention.
Physique de la sustentation
Comme pour l'avion, la vitesse relative de l'air et de la voilure génère une action mécanique qui permet à l'engin de voler. Mais, pour un hélicoptère, la rotation de ladite voilure engendre une vitesse relative y compris quand son fuselage est immobile par rapport à la masse d'air. Ceci permet à un hélicoptère de pratiquer le vol stationnaire, alors que l'avion est sujet à une vitesse « de décrochage » en deçà de laquelle le vol est impossible.
- Approximation de Froude
Selon la théorie de Froude, la puissance nécessaire à un hélicoptère correspond à la variation de quantité de mouvement imposé à la colonne d'air. Le calcul de cette variation est approximatif, mais conduit à un résultat correct en termes d'analyse dimensionnelle. Schématiquement, si l'on fait l'approximation que le rotor impose une vitesse descendante uniforme au cylindre d'air qui le traverse, la force F (en kg⋅m⋅s−2) générée par le rotor vient de ce qu'un certain débit massique d'air (en kg⋅s−1) est mis en Mouvement à une vitesse v (en m⋅s−1), la force étant le produit de ces deux quantités. Le débit massique passant à travers le disque des pales (en kg⋅s−1) dépend lui-même de la densité de l'air (en kg⋅m−3), de la surface S de ce disque (en m2) et de la vitesse v de l'air (en m⋅s−1), le débit massique étant le produit de ces trois quantités. Globalement, la force générée par le rotor est alors de la forme :

La puissance W (en kg⋅m2⋅s−3) nécessaire pour créer cette force est en première approche l'énergie cinétique () fournie à chaque élément de cette colonne d'air par unité de temps, donc le débit massique d'air est cette fois-ci multiplié par la vitesse au carré :


- Diamètre du rotor
Qualitativement, on voit que le rapport [puissance sur poussée] est proportionnel à la vitesse (moyenne) d’éjection de l'air. Pour une motorisation donnée (donc, une puissance maximale donnée), et pour une poussée nécessaire donnée (le poids de l'appareil), on voit que le poids à supporter pourra être d'autant plus important que la vitesse d'éjection par le rotor sera plus faible :
- , et donc


Mais l'autre équation nous indique que pour ce poids donné, et pour pouvoir réaliser cette vitesse imposée, la surface balayée par le rotor doit être d'autant plus grande que le poids à supporter est grand :
- , et donc :


Cette équation impose que pour une motorisation donnée (W) et un poids d'emport imposé (F) la surface balayée par le rotor doit être en proportion du cube de la masse à soulever, et donc, à puissance disponible égale, que le diamètre du rotor soit proportionnel à la puissance 3/2 de la charge. C'est la raison pour laquelle le rotor d'un hélicoptère est si grand : il vaut mieux avoir une pale longue et lente que courte et rapide.
La longueur de la pale rencontre cependant des limites pratiques, parce que l'analyse dimensionnelle ci-dessus suppose que le poids du rotor est faible devant la masse totale qu'il doit soulever. Par exemple, pour faire décoller un hélicoptère en pédalant (human-powered helicopter (en)), un athlète de 80 kg (donc pesant 785 N) développant une puissance de 250 W (la densité de l'air étant de 1,3 kg m−3) devrait utiliser un rotor de l'ordre de 1 500 m2, c'est-à-dire des pales de plus de 20 mètres ; mais des pales aussi longues entraînent un problème de poids.
- Puissance du moteur
La puissance W (en Watts) minimum nécessaire à la sustentation d'un hélicoptère de masse M (en kg) en vol stationnaire est :
- .

Où
- est la surface du disque rotor en ;
- est l'accélération de la gravité terrestre en ; et
- est la masse volumique de l'air en ;






Concrètement, les surfaces de rotor acceptables sont de l'ordre de 10 m2, et la masse volumique de l'air est de l'ordre de 1 kg m−3. Pour un hélicoptère de l'ordre de 10 tonnes (), la puissance nécessaire sera de l'ordre de 1010 W. Ceci explique que les hélicoptères n'ont en pratique été développés qu'à partir du moment où des moteurs suffisamment puissants ont été disponibles.

- Approximations
La théorie de Froude est notamment basée sur l'approximation que l'air a une viscosité nulle. Elle permet de prédire la puissance nécessaire à l'accélération de l'air vers le bas, cette accélération produisant — en vertu du principe action - réaction — une force sur les pales dirigée vers le haut.
En réalité, de toute évidence, le régime des vitesses des filets d'air traversant le rotor est un champ vectoriel variable. Il n'est pas possible donc de parler de vitesse constante, et les quantités précédentes sont le résultat de l'intégration des quantités élémentaires sur la surface du rotor ; mais ça ne change pas l'analyse dimensionnelle ci-dessus[5]. De plus, les pertes dues à la viscosité, ainsi que diverses autres pertes (la puissance nécessaire au rotor anti-couple, les pertes de la boîte de transmission, etc.) représentent environ 50 % de la puissance minimum de Froude. Une estimation réaliste de la puissance des moteurs d'un hélicoptère peut donc être obtenue en multipliant la formule ci-dessus par un coefficient de 1,5.
Configuration générale d'un hélicoptère
Un hélicoptère peut, d'une manière générale, être décomposé en un nombre limité de sous-ensembles : cellule, voilure, groupe motopropulseur, commandes de vol, servitudes de bord, avionique, emports.
La cellule est constituée du fuselage et du train d'atterrissage.
La voilure est constituée, dans la configuration la plus courante, d'un rotor sustentateur unique et d'un rotor anticouple situé à l'extrémité d'une poutre à l'arrière du fuselage. La voilure prend aussi parfois la forme de rotors sustentateurs uniquement, en nombre pair pour éliminer le besoin d'un moyen anticouple. Enfin, pour être complet, on peut mentionner les configurations plus rares suivantes :
- les hélicoptères compound dont la voilure comprend également une aile fixe (Lockheed AH-56 Cheyenne, Eurocopter X3) ;
- les hélicoptères dont la voilure se résume à un seul rotor sustentateur puisque la fonction anticouple est réalisée par d'autres moyens (NOTAR, Eurocopter X3).
Le groupe motopropulseur est constitué d'un moteur à pistons ou d'une ou plusieurs turbines entraînant les rotors.

Les commandes de vol comprennent des leviers et des pédales disposés à l'intérieur du poste de pilotage. Ces éléments sont le plus souvent doublées, pour le pilote et le copilote. Les commandes principales sont :
- le levier de pas cyclique (manche) : la commande cyclique contrôle l’inclinaison du disque du rotor principal en créant une modification cyclique de l'angle d'attaque des pales, ce qui a pour conséquence de modifier la direction de la poussée générée par le rotor ;
- le pas général (ou collectif) : le collectif contrôle l’angle d'attaque moyen des pales du rotor principal, ce qui a pour conséquence de modifier la poussée générée par le rotor ;
- le palonnier augmente ou diminue l'incidence des pales du rotor de queue, et donc la force de poussée générée par celui-ci. Ainsi, les palonniers ont pour but de faire tourner l'hélicoptère dans l'axe du rotor principal grâce au rotor de queue. La poussée du RAC (rotor anticouple) doit permettre de compenser le couple généré par le rotor principal ; ainsi, toute variation de la puissance mise en jeu sur le rotor principal, donc de la position du collectif, nécessite une action au palonnier.
Le sous-ensemble des commandes de vol comprend également toute la timonerie reliant les leviers et pédales aux rotors.
Les servitudes de bord, ensemble des systèmes qui fournissent ou transmettent l'énergie nécessaire au fonctionnement de l'hélicoptère ainsi que la vie à bord :
- circuit carburant pour l'alimentation des moteurs ;
- circuit électrique pour l'alimentation de l'avionique et des commandes de vol ;
- circuit hydraulique pour le fonctionnement des commandes de vol, du train d'atterrissage, et autres (treuil…) ;
- circuit d'air conditionné pour le confort des passagers.
L'avionique est l'ensemble des équipements électroniques (capteurs, calculateurs, actionneurs, système de communication).
Les emports sont généralement situés sur les côtés d'un hélicoptère. Il s'agit d'ancrages permettant de fixer les différents modules que peut emporter l'aéronef. Il peut s'agir de missiles, de pods d'observation (point d'emport sec) ou de réservoirs supplémentaires de carburant (point d'emport humide).
Les différentes formules de rotors
Il existe plusieurs formules de construction d'hélicoptères.
Formule classique
La plus répandue est composée de deux parties essentielles :
- Le rotor principal, dont l'axe est vertical, assure la sustentation (la portance venant de la vitesse de rotation et de l'incidence des pales), le vol en translation dans toutes les directions : verticale, longitudinale (avant, arrière) et latérale. Il assure également le contrôle d'attitude en tangage et en roulis de l'hélicoptère ;
- Le rotor de queue[6] ou rotor anticouple, appelé habituellement « RAC » par les pilotes d'hélicoptère, dont l'axe est sensiblement horizontal. Il empêche l'hélicoptère de tourner sur lui-même lorsque le rotor principal tourne et permet d'assurer le contrôle en lacet. Le premier qui utilisa ce dispositif pour son appareil fut le Russe Boris Yuriev en 1912[7].
Rotors contrarotatifs
Cette formule emploie deux rotors contrarotatifs principaux :


- avec deux rotors de sustentation en tandem (l'un à l'avant, l'autre à l'arrière). Le principal promoteur a été l'Américain Frank Piasecki ;
- avec deux rotors de sustentation coaxiaux (tournant autour du même axe), comme les appareils du constructeur russe Kamov, qui répondent à cette caractéristique définie en par Ponton d'Amécourt. La configuration coaxiale est certes complexe, mais permet une très grande stabilité de vol en stationnaire ou à basse vitesse et un encombrement de rotor réduit, ce qui explique son succès auprès des entreprises de travaux aériens lourds qui utilisent fréquemment des hélicoptères russes Kamov.
- avec deux rotors de sustentation dits « engrenants » (deux axes de rotor en « V »), dont la rotation est synchronisée de manière que leurs pales se croisent sans se toucher pendant la rotation, comme les machines du constructeur allemand Anton Flettner, reprises par l'Américain Kaman, réalisateur du K-Max, qui, de par leur conception, font également l'économie d'un rotor anticouple.
Rotor équipé d'éjecteurs à gaz
Une autre solution consiste à propulser un unique rotor avec des éjecteurs de gaz à haute vitesse positionnés en bouts de pales. Ceci permet de se passer de rotor anticouple, tous les efforts aérodynamiques de traînée étant annulés par réaction. Cette formule n'a été utilisée en série que dans de rares occasions, comme sur le petit Djinn de la SNCASO, produit dans les années 1950.
La boîte de transmission principale (BTP)
Cette boîte de transmission, élément primordial de l'hélicoptère, permet la transmission de la puissance des moteurs vers le rotor principal, ainsi que vers le rotor anticouple (RAC). Elle est dimensionnée pour répondre à plusieurs contraintes mécaniques :
- réduction de vitesse (entre la prise de mouvement « entrée » et « sortie ») ;
- alimentation des accessoires ;
- renvoi d'angle.
Elle est composée généralement de plusieurs engrenages appelés « planétaires » et « satellites » permettant de réduire la vitesse de rotation de sortie moteur (plusieurs dizaines de milliers de tours par minute pour les moteurs à turbine) et de transmettre la puissance au rotor principal (généralement aux alentours de 200 à 400 tr/min selon le diamètre rotor) ainsi qu'au RAC. Cette transmission de puissance est assumée par des engrenages (droits, hélicoïdaux, trains épicycloïdaux…). Au regard du couple transmis et des spécificités d'utilisation, le graissage est fait sous pression et refroidi par radiateur. La BTP comporte également une ou plusieurs roues libres, pour désolidariser le rotor du moteur pour le démarrage et aussi en cas de panne ou pour permettre l'autorotation sans frein. La roue libre est du type à galets : les galets sont coincés entre l'arbre menant à facettes et l'anneau extérieur de roue libre. Afin d'assurer une transmission de mouvement sans à-coups, un système à ressort plaque les galets contre l'anneau extérieur. Certains constructeurs prévoient un système de décrabotage qui permet de décoincer les galets de façon permanente : cela permet d'alimenter les accessoires sans entraîner les rotors arrière et principal. Les accessoires fixés sur la BTP sont généralement ceux qui ont besoin d'énergie mécanique : la ou les pompes hydrauliques, le ou les alternateurs, un entraînement pour le ventilateur (circuit de refroidissement huile BTP)…
Le rotor principal

Les pales du rotor principal sont généralement entraînées par le moteur au moyen d'une boîte de transmission, appelée par son acronyme BTP (boîte de transmission principale). Cependant on a aussi essayé d'utiliser la force de réaction des gaz d'échappement en extrémité des pales comme sur le Djinn.
Elles ont un profil asymétrique ou symétrique, et agissent en rotation suivant le même principe que les ailes d'un avion. Le rotor tournant toujours à vitesse angulaire constante, c'est la variation de l'angle d'incidence des pales (angle formé entre la corde de la pale et le vent relatif) qui provoque une modification du comportement du rotor. Cette action sur le « pas cyclique » est utilisée pour contrôler l'assiette de l'aéronef. Pour cabrer par exemple, il faut que le rotor induise un moment à cabrer. On modifie donc l'incidence des pales de sorte que la portance de celles-ci soit maximale au passage à l'avant de l'appareil, et minimale à l'arrière de l'appareil. L'incidence des pales varie donc de manière sinusoïdale selon leur position sur un tour du rotor. Cette variation d'incidence est donc utilisée pour les variations en tangage et en roulis. Elle est contrôlée par le pilote à l'aide du manche cyclique (l'équivalent du manche à balai sur un avion). L'autre manière de contrôler l'incidence des pales est réalisée au moyen du levier de commande du pas général (aussi appelé « pas collectif »), contrôlé par la main gauche du pilote. La variation d'incidence est dans ce cas identique pour toutes les pales quelle que soit leur position (avançante, reculante…) et permet de contrôler la portance générale générée par le rotor (pour prendre de l'altitude ou descendre).
Le rotor de queue

Le mouvement du rotor principal génère un couple de réaction qui a tendance à faire tourner la cellule autour de son axe, et en sens inverse (3e loi de Newton), sauf dans le cas d'un rotor mû par réaction (voir hélicoptère Djinn, à éjection d'air en bout de pale). Pour contrer cet effet indésirable, on place (pour les hélicoptères à un seul rotor principal), à l'extrémité de la poutre de queue un rotor secondaire plus petit et tournant dans un plan sensiblement vertical appelé « rotor anticouple » (ou RAC). La présence de ce RAC est inutile sur un hélicoptère à principe contrarotatif (ex. : Kamov), c'est-à-dire constitué de deux rotors principaux l'un au-dessus de l'autre et tournant en sens opposés, annulant ainsi l'effet de couple. Le couple de réaction variant en fonction de l'incidence des pales du rotor principal (la résistance au vent est d'autant plus grande que l'angle que forme celui-ci avec la corde des pales augmente). La force à appliquer doit elle aussi pouvoir être réglée par l'intermédiaire du rotor anticouple qui est commandé par deux pédales (le « palonnier ») situées aux pieds du pilote. Selon le sens dans lequel le pilote agit sur le palonnier (enfoncement de la pédale gauche ou de la pédale droite) il augmente l'incidence des pales du RAC, ce qui va davantage contrer le couple du rotor principal (« tirer » la queue), ou il diminue cette incidence et qui aura pour effet de laisser « filer » celle-ci.
Le mouvement de giration en vol stationnaire est commandé à l'aide du palonnier. Selon que le rotor principal tourne dans le sens horaire comme sur les hélicoptères de conception française, soviétique et russe; ou en sens anti-horaire comme c'est le cas des hélicoptères de conception américaine, britannique, italienne ou allemande (avant la fusion entre la Deutsche Aerospace AG et Aérospatiale pour créer le groupe Eurocopter), le rotor anticouple sera situé d'un côté ou de l'autre de la poutre de queue ou bien son souffle sera dirigé dans un sens ou dans l'autre, s'il est encastré dans un fenestron.

Le rotor anticouple conventionnel peut être remplacé par :
- Pour des questions de sécurité par le système NOTAR (pour « NO TAil Rotor ») qui effectue la même action au travers d'une turbine entraînée par le moteur soufflant dans la queue de l'air éjecté par des fentes (McDonnell Douglas MD-520N). Cette solution possède néanmoins l'inconvénient de ne pas atteindre l'efficacité d'un RAC de conception plus classique, mais par contre diminue les effets parasites d'un vent latéral (absolu ou relatif) ;
- Une autre solution, afin d'éviter l'emploi d'un rotor anticouple, consiste à placer un deuxième rotor principal à l'arrière et tournant à l'inverse du premier et qui contre le couple de celui-ci (Boeing CH-47 Chinook)[8] ;
- Une troisième possibilité consiste à utiliser deux rotors principaux contrarotatifs situés côte-à-côte sur des mâts rotor en V comme sur le Flettner Fl 282 Kolibri ou le K-Max de Kaman[8] ;
- La dernière solution consiste à superposer deux rotors contrarotatifs (dits coaxiaux), comme sur le Kamov Ka-50. Ces deux rotors sont chargés de contrôler l’hélicoptère dans les trois dimensions grâce à l’incidence des pales[8].
Contrôle horizontal
Pour déplacer l'hélicoptère dans une direction ou une autre, on bascule légèrement la composante de portance du rotor principal dans la direction souhaitée. La force de sustentation, perpendiculaire au plan formé par le rotor en rotation vu de côté et auparavant verticale, va donc être inclinée et laisser « glisser » l'hélicoptère dans le sens désiré. Ceci est obtenu en augmentant de façon sélective l'incidence des pales : celle qui aura une incidence plus grande aura aussi une portance plus importante et aura tendance à se soulever par rapport aux autres, provoquant par là l'inclinaison du rotor.
Pour une pale donnée, au cours de sa rotation, son incidence va donc varier d'un angle donné au départ pour augmenter puis revenir à cette même valeur quand la pale aura terminé un tour complet. Puisqu'à chaque tour les pales connaîtront une modification de leur incidence de façon récurrente, on nomme ces changements d'état la variation cyclique et c'est pour cette raison que la commande qui provoque ces modifications est appelée « commande de pas cyclique », contrôlée par la main droite du pilote (voir l'article consacré au plateau cyclique). En complément, la force de sustentation ainsi inclinée garde la même valeur et voit sa composante verticale, servant effectivement à la sustentation de l'aéronef, diminuer ce qui provoque un enfoncement de celui-ci. Ceci est compensé en augmentant légèrement l'incidence générale des pales (main gauche), action qui demandera aussi une correction au niveau du palonnier.
Les pales sont de plus animées de deux types de mouvements au cours d'une rotation complète du rotor : le battement (« flapping » en anglais) dans le sens vertical et la traînée (« lead/lag » en anglais) dans le sens horizontal. Il s'agit de déplacements angulaires de la partie courante de la pale par rapport au pied de pale qui est fixé au niveau du moyeu rotor. Ces mouvements sont dus aux forces aérodynamiques s'exerçant pendant le vol d'avancement : la dissymétrie de portance est la différence de portance qui existe entre la moitié avançante du disque rotor et la moitié reculante. Elle provient du fait que dans la direction du vol, le vent relatif s’ajoute au vent relatif rotatoire de la pale avançante et se soustrait de celui de la pale reculante. La pale qui passe la queue et qui avance du côté droit de l’hélicoptère possède une vitesse air qui atteint son maximum sur la position 3 h de l’horloge. Lorsque la pale continue, la vitesse air est essentiellement réduite à la vitesse rotatoire de l’air au-dessus du nez de l’appareil. En quittant le nez, la vitesse air décroît progressivement pour atteindre son minimum à 9 heures. La vitesse air ensuite augmente progressivement et atteint de nouveau la vitesse rotatoire en passant au-dessus de la queue. Pour éviter une rupture de la pale aux points sollicités en flexion, celle-ci est équipée d'articulations et de butées ou amortisseurs spéciaux. Les pales modernes en matériau composite s'affranchissent de ces articulations. Le premier hélicoptère sans articulations fut le Bo 105 de Ludwig Bölkow.
Vitesse maximum
Lorsqu'un hélicoptère avance et que le rotor principal, vu du dessus, tourne dans le sens anti-horaire, les pales situées du côté gauche de l'aéronef avancent en direction opposée au déplacement et celles situées sur le côté droit avancent dans la même direction. La vitesse relative des pales du côté gauche par rapport à l'air ambiant va diminuer avec l'augmentation de la vitesse de l’hélicoptère tandis que le côté droit accélérera. La portance du côté droit sera donc plus importante que du côté gauche. Pour rester stable, l'angle d'attaque des pales est modifié grâce à un dispositif appelé plateau cyclique suivant la direction de déplacement[9]. Cependant, au delà de 400 km/h, il n'est plus possible d'augmenter l'incidence des pales pour équilibrer l'hélicoptère en raison de la « séparation de couche limite » derrière le passage de la pale, et il n'est donc plus possible de compenser l'inégalité de portance. L'utilisation de rotors contrarotatifs et d'ailes qui prennent le relais à partir d'une certaine vitesse permettent de dépasser cette limite[9].
Pilotage
Mécanique du pilotage
Contrôle de la propulsion
On distingue deux composantes de cette action aérodynamique :
- la traînée qui est la résistance à l'avancement. De son action sur le rotor de l'hélicoptère, il résulte un couple tendant à faire tourner l'appareil autour de son axe, d'où la nécessité d'un dispositif anticouple ;
- la portance qui soulève l'appareil et oriente l'aéronef.
Le contrôle d'un appareil repose alors sur la gestion de cette portance[10].
Alors que sur les avions, des volets permettent de modifier la portance des ailes pour virer monter… sur l'hélicoptère, comme sur les éoliennes, on modifie le pas, donc l'inclinaison des pales. Cependant, il existe une différence. Si sur l'avion on agit individuellement sur chaque gouverne, sur l'hélicoptère on contrôle la portance d'une pale suivant sa position (azimut) par rapport à l'axe de l'appareil. C'est le rôle du plateau cyclique, pièce principale du dispositif de commande de vol.
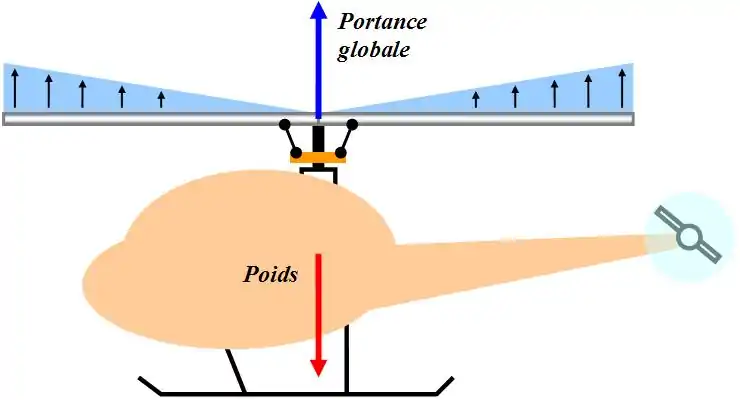
Vol stationnaire
Le rotor de l'hélicoptère étant entraîné à vitesse constante, les déplacements verticaux de l'hélicoptère sont obtenus par la seule modification du pas des pales. À ce stade du vol, la portance des pales reste identique sur un tour du rotor. Il existe une position où la portance globale s'oppose exactement au poids de l'appareil : l'hélicoptère peut rester immobile. Si elle lui est inférieure, l'appareil descend. Si elle est supérieure, il monte.
 Équilibre en vol stationnaire.
Équilibre en vol stationnaire. Déséquilibre.
Déséquilibre.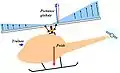 Déplacement stabilisé ou vol en translation.
Déplacement stabilisé ou vol en translation.
Vol en translation
Pour que l'hélicoptère avance il faut une force à composante horizontale. Si on augmente la portance des pales lorsqu'elles passent derrière le rotor, leur plan de rotation s'incline vers l'avant, grâce à une articulation en battement reliant chaque pale à l'axe de rotation, et l'inclinaison de la portance produit la composante horizontale nécessaire. Il reste toutefois une composante verticale principale qui s'oppose au poids permettant le maintien en l'air, et la composante horizontale motrice engendre le mouvement d'avancement, donc accélération jusqu'à une vitesse où la traînée globale (résistance à l'avancement de l'hélicoptère) s'équilibrera avec la composante motrice.
Le principe est le même quelle que soit la direction de déplacement souhaitée.
Cas particulier : le vol en cas de panne de moteur
En cas de panne du/des moteur(s), le pilote d'hélicoptère doit se poser en autorotation, c'est un cas de vol spécifique à l'hélicoptère mais aussi à l'autogire. Cette manœuvre peut s'apparenter au vol plané en avion.
Si le(s) moteur(s) ne tourne(nt) plus, les rotors ne sont donc plus entraînés. Les rotors peuvent continuer à tourner grâce à une roue libre, et au vent relatif qui souffle à travers le rotor principal (loi de Froude). Puisque les pales continuent à tourner, l'hélicoptère ne va pas tomber comme une pierre, sa chute est ralentie, et même contrôlée, seulement ses vitesses horizontales et verticales sont encore trop grandes, le pilote va effectuer différentes actions permettant d'amener son hélicoptère dans une configuration permettant un posé en douceur.
Lors d'une panne moteur, le pilote d'un hélicoptère doit effectuer les actions suivantes :
Mise en autorotation
Il s'agit pour le pilote de baisser rapidement le pas général (jusqu'à la butée de plein petit pas si nécessaire), puis de maintenir un régime rotor dans une plage autorisée (indiqué sur l'instrument correspondant) d'après le manuel de vol du constructeur de l'appareil. Il s'agit de rester en dessous du régime rotor principal maximum autorisé.
Descente
Il faudra ensuite conserver une vitesse horizontale de l'ordre de 50 à 70 kt pendant la descente. Le pilote peut prendre la vitesse qu'il souhaite suivant l'aérologie et le relief. (Le taux de chute pouvant tout de même aller jusqu'à 1 500 - 2 000 ft/min). Le pilote devra alors choisir un secteur d'atterrissage adapté pour se poser avec de préférence une composante de vent de face (c’est-à-dire avec un vent de secteur avant plus ou moins).
Atterrissage
À une hauteur sol dépendant de plusieurs facteurs (le type d'hélicoptère, le taux de descente, de la vitesse propre et aussi de la vitesse sol finale recherchée), il devra tirer sur la manette de pas général pour augmenter la portance et diminuer la vitesse de descente, il faut ensuite réaliser un flare en cabrant la machine. Le flare va permettre de diminuer (casser) la vitesse horizontale afin de pouvoir réaliser un atterrissage, soit glissé en sécurité, soit posé à plat si le sol ou l'environnement ne permet pas un posé glissé.
Phase finale
À une hauteur comprise entre 3 et 10 pieds (soit entre 1 et 3 mètres) reprendre une assiette nulle ou très légèrement positive et soutenir la machine au pas général pour amortir le contact avec le sol en convertissant l'énergie cinétique du rotor en force de sustentation. L'art de l'autorotation réside dans le dosage de cette mise de pas : effectuée trop haut, l'appareil se retrouve sans tours rotor, donc sans portance et risque de heurter le sol violemment, effectuée trop tard ou mal dosée et l'appareil heurte le sol avec une vitesse verticale importante et peut être là aussi être gravement endommagé, voire détruit.
Utilisations
L'hélicoptère possède un avantage considérable sur l'avion : son aptitude à effectuer un vol stationnaire (maintenir une position fixe en vol — ou sustentation —) qui lui permet d'atteindre des endroits inaccessibles à son homologue à voilure fixe qui doit presque toujours utiliser une piste. En contrepartie, l'hélicoptère a besoin d'un moteur bien plus puissant afin de se soulever du sol, limitant en cela sa capacité d'emport.
Les particularités qui font l'intérêt de l'hélicoptère sont sa capacité à décoller et atterrir verticalement, son accès possible aux lieux étroits et la possibilité de se déplacer lentement et dans tous les axes (en particulier latéralement et à reculons). L'hélicoptère est donc doué d'une manœuvrabilité adaptée à un certain nombre de situations spécifiques.
Utilisations civiles
-SchweizerischeRettungsflugwacht.jpg.webp)



On appelle « activités civiles » tout ce qui n'est pas expressément militaire. Elles comprennent donc, en plus des hélicoptères privés et des sociétés de transport de passagers ou de travail aérien, les activités de l'aviation civile dites « parapubliques » comme les services de :
Sécurité et assistance
- police et de gendarmerie (voir aussi recherche et sauvetage) ;
- services médicaux aériens, assistance médicalisée par hélicoptère ;
- lutte contre les incendies par hélicoptère bombardier d'eau (HBE) ;
- sécurité civile, pour l'évacuation d'urgence et le sauvetage de personnes.
Transport
- transport de passagers sur des lignes régulières (comme la liaison Nice-Monaco ou L'Île-d'Yeu-Fromentine en Vendée)[11] ;
- ravitaillement de sites inaccessibles par la route (comme les îlets de Mafate) ;
- transport à la demande (et baptême de l'air) ;
- transport off-shore (activité spécifique assez différente du transport à la demande, qui consiste au transport d'ouvriers sur des plates-formes pétrolières) ;
- transport de marchandises (hélicoptère de transport ou levage par grue volante de matériel de construction et de travaux) ou bien pour acheminer du matériel ou du fret en urgence pour des usines ;
- dépose de pilote de port (généralement sur des navires pour l'accostage de ces derniers au port) ;
Autres usages
- épandage agricole (dispersion d'engrais ou d'eau sur des surfaces difficiles d'accès) ;
- lutte anti-acridienne : dispersion dans l'atmosphère de produits pour l'élimination d'insectes (généralement en Afrique) ;
- école (pour former des pilotes privées et les professionnels, ou pour maintenir les qualifications et les compétences) ;
- vols techniques : vols de maintenance, vols de relevés topographiques / électriques (dans ces derniers cas l'appareil doit être alors spécialement équipé pour ces types de relevés) ; déclenchement artificiel d'avalanche de neige ;
- vols de prises de vues aériennes ou reportage photo ou vidéo (La Terre vue du ciel, Home, ou encore le Paris-Dakar et le Tour de France, Pékin Express) ;
- travaux dans des lieux d'accès difficiles (ex : montagne, îles) : construction de pylônes de lignes électriques, de remontées mécaniques, chantiers d'altitude (ex : refuges, gares de remontées mécaniques), assistance de personnel pour la réalisation de travaux ;
- surveillance de lignes électriques ou d'éoliennes ;
- relevé de données servant à calibrer des stations pour l’émission d'ondes hautes fréquences ;
- prospection minière équipements spécifiques peuvent être nécessaires pour ce type de mission particulier) ;
- assistance sismique pour la recherche pétrolière.
Utilisations militaires

.jpg.webp)
Dans les armées, les différents types d'hélicoptères servent à de nombreux usages: comme hélicoptère de reconnaissance, hélicoptère de manœuvre et d'assaut, hélicoptère de combat pour la lutte antichar, la lutte antiaérienne, l'appui aérien rapproché et la protection aux troupes au sol ou aux autres hélicoptères, hélicoptère de transport de troupes ou de matériel, évacuation sanitaire, sauvetage, commandement et guerre électronique, lutte anti-sous-marine, etc.
Dès la Seconde Guerre mondiale jusqu'en Corée et en Indochine, les hélicoptères militaires assurent avant tout un rôle de soutien dans l'observation d'artillerie et l'évacuation sanitaire[12]. À partir du milieu des années 1950, à la faveur des progrès réalisés par les Français en Algérie et le Howze Board (en) aux États-Unis, l'hélicoptère étend son emploi au transport tactique armé, dont l'exemple le plus célèbre est certainement le UH-1 Huey employé de manière extensive par les Américains au Viêt Nam. Alors que son armement devient plus important, ses missions s'élargissent et l'on voit apparaître dès le milieu des années 1960 un hélicoptère d'attaque, propre à l'appui-feu, sous la forme de l'AH-1 Cobra qui est construit à partir d'un châssis de Huey. Enfin, les années 1970 et 1980 voient l'avènement d'un hélicoptère de manœuvre, développé par les Soviétiques puis les Américains dans la perspective d'une guerre conventionnelle en Europe. C'est l'âge d'or de l'hélicoptère de combat (ou aérocombat) qui interviendrait alors de manière décisive afin d'opérer un « enveloppement vertical » qui permettrait de prendre l'ennemi en tenaille[12].
En France, l'aviation légère de l'Armée de terre (ALAT) regroupe environ 70 % des hélicoptères de l'armée française et fait partie intégrante de l'armée de terre de ce pays, servant principalement à l'appui des troupes au sol, que ce soit au combat (par exemple antichar), ou en ravitaillement. Sa principale composante est à base d'hélicoptères, dont les différents rôles sont l'éclairage des forces au sol (chars et infanterie), le repérage de cibles pour l'artillerie, l'engagement des forces d'éclairage adverses, ainsi que la dépose et la récupération de soldats en zone ennemie. Quantitativement, son parc aérien représente en 2015 : 285 hélicoptères (26 Cougar, 51 Tigre (67 prévu), 75 SA.330 Puma, 110 SA.341 Gazelle, 8 Caracal et 15 NH90 Caiman (74 prévu).
Son équivalent dans l'US Army est l'United States Army Aviation Branch, la Heeresfliegertruppe et Luftbewegliche Brigade 1 (de) pour l'ancienne Nationale Volksarmee et actuelle Bundeswehr allemande et l'Army Air Corps dans la British Army.
Le drone hélicoptère est un hélicoptère sans pilote dirigé depuis une station terrestre et utilisé principalement comme drone de surveillance.
Règlementation
Les hélicoptères sont notamment soumis aux réglementations concernant la sécurité aérienne et la gestion de l'espace aérien.
France
En France, exploiter des hélicoptères pour le transport public nécessite une licence d’exploitation et un certificat de transporteur aérien (CTA) conformément au règlement européen no 965-2012 du [13]. L’exploitation d’hélicoptères avec moins de trois passagers à bord pour des vols locaux n’est pas soumise à l’exigence d’un CTA[14].
Europe
En Europe, un nouveau règlement européen publié par l'Agence européenne de la sécurité aérienne (AESA), dit « Règlement européen AIR OPS (965/20012) », régit le transport public de passagers en hélicoptère (en vigueur depuis le ). Pour des raisons de sécurité, il interdit notamment aux hélicoptères monomoteurs de survoler les zones habitées ne disposant pas d'« aires de recueil immédiat ». Les hélicoptères autorisés seront ceux équipés de deux moteurs « performants » capables d'assurer « des opérations en classe de performances 1 », c'est-à-dire selon la DGAC « avec des performances telles que, en cas de défaillance du groupe motopropulseur le plus défavorable, l'hélicoptère peut soit atterrir dans la distance utilisable pour le décollage interrompu, soit poursuivre le vol en sécurité jusqu'à une aire d'atterrissage appropriée, selon le moment où la défaillance survient ».
Il y aurait en 2014 en France environ un millier d’hélicoptères civils en service à 50 % bimoteurs[15] et parmi ces hélicoptères, selon l’Union française de l’hélicoptère (UFH), 480 machines (dont les trois quarts sont monomoteurs) sont utilisées (par 80 sociétés) pour du transport civil, d'où des difficultés[16], notamment pour le survol de la région parisienne[17].
Économie
Secteur d'activité
Les hélicoptères emploient un grand nombre de personnes à travers le monde qui travaillent sur le fuselage, les turbines, les instruments de bord ou bien la commercialisation des machines.
Ainsi, à titre d'illustration, l'entreprise Airbus Helicopters, le premier fabricant mondial d'hélicoptères, emploie près de 16 000 salariés pour un CA de 4,8 milliards d'euros en 2010 (contre 3,8 milliards en 2006), Sikorsky Aircraft Corporation regroupe 14 000 salariés en 2007 pour 3,2 milliards d'euros en 2006, Turbomeca 6 200 personnes pour 950 millions d'euros de CA, Bell Aircraft Corporation emploie 10 200 salariés pour un CA 2010 de 3,241 milliards de dollars, et AgustaWestland réalise un CA de 3,5 milliards d'euros en 2009 pour 14 300 employés. En 2001, Eurocopter possédait une part de marché mondiale de 40 % et de 30 % aux États-Unis. La part de marché mondiale d'Eurocopter sur le marché civil et parapublic était de 52 %, loin devant ses premiers concurrents Bell, Agusta, Boeing et Sikorsky.
En 2012, Eurocopter domine le marché des hélicoptères civils revendiquant 44 % des livraisons sur le marché mondial des hélicoptères civils et parapublics (police et services d'urgence) pour un marché évalué à 750 hélicoptères (25 % pour Bell et 16 % pour l'Italien Agusta Westland)[18]. Sur le marché militaire (pour un marché de 698 appareils), l'Américain Sikorsky est leader devant les constructeurs russes qui ont chacun 24 % et Eurocopter avec 18 % de parts de marché.
Le marché des hélicoptères représente 1 600 livraisons par an en moyenne. À fin 2010, le marché mondial de l'hélicoptère se décompose de façon schématique à hauteur de 40 % pour la partie Défense, 11 % pour l'aviation d'affaires, 7 % pour les forces policières, 4 % pour l'industrie gazière et pétrolière et 4 % pour l'évacuation médicale[19]. Eurocopter a livré 588 hélicoptères à ses clients en 2008 contre 488 en 2007 et 558 en 2009[20]. Son principal concurrent, l'américain Sikorsky, a vu ses ventes augmenter de 50 % en 2007 à 4,8 milliards de dollar.
Selon une étude prospective menée par Rolls Royce, fabricant de turbine, près de 16 000 nouveaux hélicoptères entreront en service dans les 10 prochaines années pour un montant estimé de 141 milliards de dollars pour les machines et 13,3 milliards pour les turbines. Le marché civil portera la croissance avec une augmentation en volume prévue de 50 % des livraisons (9 095 appareils produits) pour une valeur de 31,5 milliards de dollars[21]. La demande mondiale d'hélicoptères est tirée par la demande d'hélicoptères pour les plates formes pétrolières off-shore ou les appareils destinés à une clientèle d'hommes d'affaires.
Parmi les tendances observées début 2013 sur le marché de l'hélicoptère, on observe la poursuite de la forte demande pour les hélicoptères de transport par l'industrie pétrolière et gazière, la demande soutenue dans le marché des services médicaux de secours et enfin l'émergence d'un marché de leasing[18]. Le salon Heli-Expo 2013 de Las Vegas confirme la bonne santé du marché des hélicoptères, qui avait été beaucoup malmené en raison de la crise financière en 2009 et 2010.
Principaux constructeurs
- Agusta
- Boeing Rotorcraft Systems
- Aérospatiale
- Bell Aircraft Corporation
- Denel Aerospace Systems
- Airbus Helicopters (ex-Eurocopter)
- Hélicoptères Guimbal
- Hindustan Aeronautics Ltd.
- Kamov
- Messerschmitt-Bölkow-Blohm
- Mil
- MD Helicopters
- NHIndustries
- Piasecki Helicopter
- Robinson Helicopter
- Sikorsky Aircraft Corporation
- Sud-Aviation
- Westland Helicopters
Records
- Vitesse : 400,87 km/h (Westland Lynx AH.1 modifié)
- Altitude en vol :
- Posé : Mont Everest, 8848 m
- Distance en vol :
Représentations de l'hélicoptère


Arts
Peinture et photographie
Peu peints, les hélicoptères sont davantage photographiés. À cet égard, de nombreuses illustrations d'hélicoptères existent. Parmi les photos célèbres figure celle de Hubert van Es, Helicopters on the Roof, représentant l'évacuation de Saïgon en hélicoptères Huey lors de la déroute américaine en 1975.
Cinéma
Parmi les films et séries centrés sur l'hélicoptère figurent :
- La Chute du faucon noir
- Tonnerre de feu
- Apocalypse Now
- M*A*S*H
- Supercopter
- Medicopter 117
- Mission sauvetages
Philatélie
Les hélicoptères figurent sur de nombreux timbres à travers le monde où ils ont parfois fait l'objet de tirage dans le cadre d'une série comme au Kampuchéa en 1966.
Modélisme
Les hélicoptères ont suscité l'intérêt des amateurs de modèle réduit d'aéronef. Les hélicoptères radiocommandés, dans les mains de pilotes confirmés, sont capables de réaliser des prouesses (vol 3D ou voltige) qui ne sont pas réalisables avec des hélicoptères grandeur nature.
Musée
- Musée de l'hélicoptère de Bückeburg, en Allemagne
Salons et expositions
 Salon international de l'aéronautique et de l'espace de Paris-Le Bourget (SIAE)
Salon international de l'aéronautique et de l'espace de Paris-Le Bourget (SIAE).svg.png.webp) Salon aéronautique de Farnborough (FIA) et le Royal International Air Tattoo (RIAT)
Salon aéronautique de Farnborough (FIA) et le Royal International Air Tattoo (RIAT) Salon aéronautique international de Berlin (ILA)
Salon aéronautique international de Berlin (ILA) Salon international aérospatial de Moscou (MAKS)
Salon international aérospatial de Moscou (MAKS)

Sur Mars
L' hélicoptère Ingenuity ou Mars Helicopter Scout (MHS) est un petit hélicoptère d'un peu moins de deux kilogrammes développé par l'agence spatiale américaine, la NASA, qui est mis en œuvre à titre expérimental, sur le sol de la planète Mars au cours de la mission spatiale Mars 2020 lancée le 30 juillet 2020 à bord d'une fusée Atlas V et dont l'atterrissage a eu lieu le 18 février 2021. MHS a effectué une trentaine de vol entre février et septembre 2022.
Notes et références
- ↑ Thierry Le Roy, « L'hélicoptère : une invention prometteuse au XIXe siècle. », dans Pour la Science (ISSN 0153-4092), Les génies de la science, no 31, mai-juillet 2007
- ↑ Jules Verne en 80 jours : Michel Meurger, « La Légende de la science », p. 23, Cité des sciences et de l'industrie (CSI), 2005 [PDF]
- ↑ (en) Jacques Bréguet Gyroplane Laboratoire, Century of Flight.
- ↑ Intervention urgente, secours en montagne, manutention particulière, etc..
- ↑ (en) Gordon J. Leishman, Principles of Helicopter Aerodynamics, Cambridge University Press, (lire en ligne), p. 67.
- ↑ Dans le cas de deux rotors contra-rotatifs ou de deux rotors, il n'y a pas besoin d'un rotor de queue
- ↑ (en) Yuriev helicopter, All the World's Helicopters and Rotorcraft
- 1 2 3 Signes de reconnaissance : Sans rotor de queue, helicopassion.com (voir archive)
- 1 2 (en-US) David Grossman, « Why Aren't Helicopters Faster? », sur Popular Mechanics, (consulté le )
- ↑ Animation sur un site extérieur
- ↑ L’hélicoptère, une offre complémentaire de mobilité pour renforcer l’attractivité du Grand Paris, Rapport de la Chambre de commerce et d'industrie de Paris, juillet 2011
- 1 2 Étienne de Durand, Benoit Michel, et Elie Tenenbaum, La guerre des hélicoptères : L'avenir de l'aéromobilité et de l'aérocombat, Focus stratégique no 32, juin 2011
- ↑ Règlement (UE) no 965-2012 de la Commission du 5 octobre 2012, Journal officiel de l'Union européenne, 25 octobre 2012 [PDF]
- ↑ Transport public par hélicoptères, Ministère de l'Écologie, du Développement durable et de l'Énergie, 11 décembre 2008 (mis à jour le 12 mars 2015)
- ↑ Une nouvelle réglementation européenne inquiète les exploitants d’hélicoptères, Bruno Trévidic, Les Échos, 5 août 2014
- ↑ Vent de panique chez les hélicoptéristes français, Le Monde, 31 octobre 2014
- ↑ Un grand nombre d'hélicoptères interdits de survoler Paris- Fabrice Gliszczynski, La Tribune, 27 octobre 2014
- 1 2 Eurocopter touche le jackpot à Las Vegas, La Tribune, 11 mars 2013
- ↑ Bell Helicopter: le marché de l'hélicoptère reprend de l'altitude, La Presse Affaires, 29 novembre 2010
- ↑ Eurocopter prévoit une reprise du marché civil d'ici 2011, L'Expansion, 20 janvier 2010
- ↑ Rolls Royce prévoit la production de 16 000 hélicoptères d'ici 2017, UsineNouvelle.com, 27 février 2008
Bibliographie
- Yves Debay, Hélicoptères de combat, Paris, Histoire & collections, (ISBN 978-2-908182-51-4)
- Henri-James Marze (Eurocopter France), Jean-Jacques Philippe (Onera), L'hélicoptère silencieux, un programme de recherches en cours, une réalité de demain, dans Nouvelle revue Aéronautique et Astronautique, no 2, (ISSN 1247-5793)
- (en) J. Gordon Leishman, Principles of helicopter aerodynamics, Cambridge New York, Cambridge University Press, , 864 p. (ISBN 978-0-521-85860-1, lire en ligne)
- Georges Doat, Le pilotage des hélicoptères, Levallois-Perret (Hauts-de-Seine, Altipresse, , 159 p. (ISBN 978-2-911218-43-9)
- Jean Courvoisier, Hélicoptère : manuel du pilote, Paris, Chiron Ed, (ISBN 978-2-7027-0610-7)
- collectif, L'atlas des hélicoptères, Paris Issy-les-Moulineaux, Atlas Glénat, , 235 p. (ISBN 978-2-7234-3368-6)
- Patrice Gaubert, Luc Jérôme, Rémy Michelin et Philippe Poulet, Hélicoptères la grande épopée des voilures tournantes françaises, Les Echelles, Mission Spéciale roductions, , 125 p. (ISBN 978-2-916357-28-7)
- René Mouille, Des capots aux moyeux rotors : des hélicoptères presque en plastique, dans Revue aerospatiale, numéro hors-série 20 ans d’Aérospatiale,
- Bernard Bombeau, Hélicoptères : la génèse, de Léonard de Vinci à Louis Breguet, Toulouse, Privat, , 358 p. (ISBN 978-2-7089-9205-4)
- Général Michel Fleurence, Colonel Bertrand Sansu et al. (préf. général d'armée aérienne Jean-Paul Palomeros), Histoire des unités d'autogires et d'hélicoptères des forces aériennes françaises, Vincennes, Association Hélicoptères Air, , 667 p. (ISBN 978-2-7466-3439-8, OCLC 870299330)
- Commandant M. Lamé, Le vol vertical et la sustentation indépendante, Hélicoptères -- Gyroptères -- Avions-hélicoptère, Paris, Librairie de la Vie Technique et Industrielle, (lire en ligne)
- Alain Ernoult, Fou d'ailes, , 311 p. (ISBN 978-2-7324-7698-8), pages 276-285
Voir aussi
Articles connexes
Liens externes
- Notices dans des dictionnaires ou encyclopédies généralistes :
- (en) BlueSkyRotor, base de données sur l'industrie hélicoptériste
- [vidéo] L'hélicoptère - Film documentaire d'Antoine Gauchet sur YouTube, ABVM, .
- [vidéo] Hélicoptères - C'est Pas Sorcier sur YouTube