

Mars Exploration Rover (MER) est une mission double de la NASA lancée en 2003 et composée de deux robots mobiles ayant pour objectif d'étudier la géologie de la planète Mars, en particulier le rôle joué par l'eau dans l'histoire de la planète. Les deux astromobiles ont été lancés au début de l'été 2003 et se sont posés en sur deux sites martiens susceptibles d'avoir conservé des traces de l'action de l'eau dans leur sol. Chaque astromobile, piloté par un opérateur depuis la Terre, a alors entamé un périple en utilisant une batterie d'instruments embarqués pour analyser les roches les plus intéressantes :
- MER-A, rebaptisé Spirit, a atterri le dans le cratère Gusev, une dépression de 170 kilomètres de diamètre qui a peut-être accueilli un lac ;
- MER-B, renommé Opportunity, s'est posé le sur Meridiani Planum.
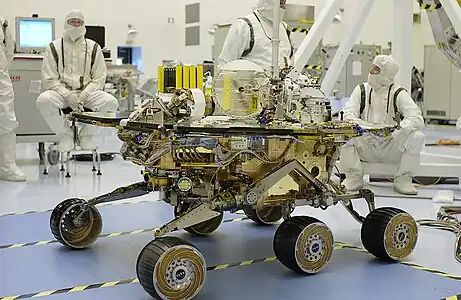
Chaque rover pèse environ 185 kg et se déplace sur six roues mues par l'énergie électrique fournie par des panneaux solaires. Il est équipé de trois paires de caméras utilisées pour la navigation et de plusieurs instruments scientifiques : une caméra panoramique située sur un mât à 1,5 mètre de hauteur, un outil pour abraser la surface des roches porté par un bras articulé sur lequel se trouvent également un spectromètre à rayons X, un spectromètre Mössbauer et une caméra microscope. Enfin, un spectromètre infrarouge est utilisé pour l'analyse des roches et de l'atmosphère.
La mission MER fait partie du programme d'exploration de Mars de la NASA et prend la suite de deux missions américaines sur le sol martien aux capacités scientifiques beaucoup plus limitées : le programme Viking de 1976 et Mars Pathfinder de 1997. Les objectifs scientifiques du programme ont été remplis, marqués par la découverte par les deux robots de plusieurs formations rocheuses qui résultent probablement de l'action de l'eau dans le passé : billes d'hématite grise et silicates. Les robots ont également permis d'étudier des phénomènes météorologiques de la planète, d'observer des nuages et de caractériser les propriétés des couches de l'atmosphère martienne. Les deux véhicules MER conçus et gérés par le Jet Propulsion Laboratory ont largement dépassé les objectifs qui leur étaient fixés : parcourir 600 mètres et rester opérationnel durant 90 jours martiens. Spirit, désormais bloqué par le sable, a pu parcourir 7,7 kilomètres et a transmis ses dernières données scientifiques le . Opportunity, après une tempête de sable qui a recouvert ses panneaux solaires, est devenu injoignable et sa mission s'est officiellement terminée le .
Historique
Sondes martiennes américaines des années 1990

La NASA lance en 1992 la mission Mars Observer alors qu'il s'est écoulé dix-sept ans depuis le programme américain Viking et sa dernière mission Viking 2. Mais trois jours avant la date prévue pour l'insertion sur son orbite martienne, le contact est perdu. Mars Observer est la sonde la plus coûteuse lancée par la NASA et elle est perdue avant d'avoir accompli sa mission (813 millions de dollars de l'époque). Cet échec entraîne une révision de la stratégie d'exploration planétaire américaine : celle-ci doit désormais permettre d'envoyer davantage de sondes à budget serré de manière à ne pas tout perdre en cas d'échec, suivant la devise « better, faster, cheaper » du nouveau programme Discovery. Dans le cadre de ce programme, à chaque conjonction favorable de Mars et de la Terre (soit environ tous les deux ans), la NASA prévoit d'envoyer à la fois une sonde spatiale de type orbiteur, qui doit effectuer ses observations depuis l'orbite martienne, et une autre de type atterrisseur, chargée de se poser sur le sol martien pour y recueillir des données scientifiques. Les deux premières sondes sont lancées en 1996 et remplissent leur mission avec succès : l'atterrisseur Mars Pathfinder se pose sur Mars et libère le premier robot mobile extraplanétaire, Sojourner, qui explore les environs durant quelques semaines ; l'orbiteur Mars Global Surveyor renvoie durant neuf ans une quantité inégalée de données sur l'atmosphère, la surface et la structure interne de Mars. Conformément à ses plans, la NASA lance fin 1998/début 1999 deux nouvelles sondes lorsque Mars se trouve dans une position favorable, mais Mars Climate Orbiter et Mars Polar Lander sont toutes deux victimes de défaillances avant d'avoir commencé leur mission. La NASA décide d'annuler le lancement des deux sondes de Mars Surveyor 2001 : l'atterrisseur devait comporter un rover, baptisé Athena aux capacités très proches des rovers MER. L'échec entraîne également la remise en question du principe du « better, faster, cheaper » et l'arrêt des lancements doubles de sondes construites selon ce principe.
Changement de stratégie
Au début des années 2000, alors que la NASA achève le développement de la sonde 2001 Mars Odyssey, l'agence spatiale américaine décide de revoir sa stratégie d'exploration de la planète Mars. La sonde Mars Global Surveyor a envoyé des données qui confirment que la planète a eu une histoire climatique complexe et intéressante au cours de laquelle de grandes masses d'eau ont coulé sur le sol martien. Mais le déroulement de ces événements et la manière dont l'eau a interagi avec l'atmosphère et la surface martienne n'ont pu être reconstitués[1]. Compte tenu de ce nouvel éclairage sur le passé martien, beaucoup de scientifiques souhaitent l'envoi d'une mission spatiale capable de ramener un échantillon du sol martien sur Terre qui pourrait apporter des réponses décisives à certaines de ces interrogations. Mais, la réussite de cette mission très complexe nécessite que de nombreuses conditions soient remplies : identifier un site d'atterrissage susceptible d'abriter des traces de vie, effectuer un atterrissage d'une très grande précision et disposer d'un robot capable d'atteindre le site visé pour récupérer un échantillon intéressant si nécessaire en forant. Or, seule la caméra à très haute définition de Mars Reconnaissance Orbiter, dont le lancement est prévu en 2006, peut éventuellement identifier un site favorable. De plus, le risque est grand de ramener un échantillon ne fournissant aucune donnée exploitable. La NASA n'a pas à cette période de budget suffisant pour une mission aussi coûteuse.
Mission MER

L'agence spatiale se rabat donc sur une mission reposant sur un rover géologue qui doit explorer, analyser sur place à l'aide de ses instruments scientifiques embarqués et transmettre les résultats de ses mesures. La NASA écarte l'utilisation d'un rover dérivé de Mars Pathfinder car son autonomie trop limitée ne permettrait pas de prospecter suffisamment le sol martien. Le JPL propose de développer un rover, baptisé Mars Exploration Rover (MER), avec des dimensions nettement supérieures, doté d'une plus grande autonomie et suffisamment léger pour permettre l'utilisation de coussins gonflables (« airbags ») utilisés avec succès pour l'atterrissage de la sonde Pathfinder. Pour limiter les risques de la mission, la NASA décide en d'envoyer deux engins similaires, comme cela se pratiquait couramment au début de l'ère spatiale : l'agence argumente que le coût de la construction d'un deuxième exemplaire est faible par rapport à celui du développement du MER et que par contre si les deux rovers réussissent leur mission, les gains scientifiques seront fortement accrus. L'agence spatiale renonce à sa politique des sondes bon marché : l'ensemble de la mission va coûter 850 millions de dollars. La NASA planifie le lancement pour la prochaine fenêtre de tir en direction de Mars qui doit s'ouvrir durant l'été 2003. Chaque MER est équipé de six instruments scientifiques et est conçu pour parcourir au moins 1 km durant 90 jours martiens[1].
Objectifs scientifiques de la mission
La NASA assigne sept objectifs scientifiques à la mission[2] :
- rechercher des roches et des sols témoignant de l'action passée de l'eau et déterminer leurs caractéristiques. Cette recherche porte en particulier sur les minéraux déposés par les processus liés à la présence d'eau tels que les précipitations, l'évaporation, la sédimentation et l'activité hydrothermale ;
- déterminer la distribution et la composition des minéraux, rochers et sols qui entourent les sites d'atterrissage ;
- déterminer les processus géologiques à l'origine de la formation des sols avoisinants et qui ont influencé leur chimie. Ces processus peuvent inclure l'érosion par l'action du vent ou par l'eau, l'activité hydrothermale, le volcanisme et l'impact de météorites ;
- valider les données collectées par les sondes en orbite en les confrontant aux observations au sol. Ces vérifications doivent permettre de déterminer la précision et le bon fonctionnement des différents instruments qui effectuent des observations géologiques depuis l'orbite ;
- rechercher des minéraux contenant du fer, identifier et quantifier les différents types de minéraux qui contiennent de l'eau ou ont été formés dans l'eau tels que les carbonates de fer ;
- déterminer les caractéristiques des minéraux ainsi que les textures des roches et des sols et spécifier les processus qui les ont créés ;
- rechercher des indices géologiques de la période où l'eau était présente sous forme liquide. Déterminer si ces environnements pouvaient être propices à la vie.
Architecture technique fortement inspirée des missions précédentes
La conception des sondes MER repose en grande partie sur des développements réalisés pour des missions antérieures. L'architecture utilisée pour la mission Pathfinder de 1996 est reprise pour l'étage de croisière chargé de propulser les sondes entre la Terre et Mars et le véhicule de rentrée et le module d'atterrissage. Ceux-ci sont toutefois redimensionnés : le parachute est 40 % plus grand et les fusées chargées de ralentir la sonde avant l'atterrissage sont 90 % plus puissantes. Les instruments scientifiques sont un héritage du rover Athena qui devait constituer la charge utile de l'atterrisseur de la mission Mars Surveyor 2001 annulée[3].
Principaux composants de la sonde MER


Les deux sondes MER sont identiques. Une fois sur le sol martien, le rover est complètement autonome, mais pour parvenir à destination, il doit franchir les 56 millions de kilomètres qui séparent Mars de la Terre puis effectuer une rentrée atmosphérique violente dans l'atmosphère martienne avant de se poser à faible vitesse. Le rover, d'une masse de 185 kg, ne représente qu'une fraction de la masse totale de la sonde MER (1 063 kg) qui comporte plusieurs éléments chargés de l'amener à bon port :
Étage de croisière
L'étage de croisière, d'une masse de 193 kg, a la forme d'une galette peu épaisse de 2,65 mètres de diamètre. Il doit permettre à la sonde MER de franchir l'espace entre la Terre et Mars. À cet effet, il est chargé de corriger la trajectoire grâce à deux grappes de petits propulseurs fonctionnant à l'hydrazine dont la sonde emporte 31 kg. Il dispose de 5 détecteurs solaires et d'un suiveur stellaire pour déterminer la position de la sonde. Deux antennes de communication, à petit et moyen gain, transmettent en bande X les télémesures qui permettent à l'équipe sur Terre de contrôler le fonctionnement de la sonde et reçoivent en retour des instructions. L'étage de croisière dispose de ses propres panneaux solaires d'une superficie de 4,4 m2 qui fournissent 600 W d'énergie électrique (300 W près de Mars) car ceux du rover, encapsulé, ne sont pas utilisables. Par contre, l'ordinateur du rover constitue le cerveau de la sonde durant ce trajet. Enfin, l'étage de croisière est équipé de radiateurs pour évacuer la chaleur produite par l'électronique à bord[a 1],[4].
Véhicule de rentrée
Lorsque la sonde MER est sur le point de rentrer dans l'atmosphère de Mars, l'étage de croisière qui a rempli son office est largué. La traversée de l'atmosphère de MER à 5,5 km par seconde va provoquer un énorme échauffement des parties externes de la sonde qui atteignent une température de 1 500 °C. Pour protéger l'astromobile durant cette phase, celui-ci est encapsulé entre deux boucliers qui forment dans le jargon de la NASA le véhicule de rentrée. Le bouclier avant, dit thermique, d'une masse de 79 kg, subit l'échauffement le plus important : il est presque plat et est recouvert d'un revêtement ablatif qui évacue la chaleur en s'évaporant progressivement. Le bouclier arrière d'une masse de 209 kg a une forme conique et est également recouvert d'un revêtement ablatif toutefois d'une épaisseur plus faible ; il contient également le parachute, plusieurs propulseurs qui seront utilisés durant la phase finale de l'atterrissage ainsi que de l'électronique et un système de guidage inertiel[5].
Module d'atterrissage
Le module d'atterrissage a pour rôle de protéger l'astromobile, conjointement avec les airbags, lorsque celui-ci est largué à une vingtaine de mètres du sol. C'est une structure en matériaux composites constituée d'une plate-forme sur laquelle est posé le rover et de trois pétales formant en position repliée une structure tétraédrique. Le module d'atterrissage, qui pèse 348 kg, comprend plusieurs dispositifs permettant à l'astromobile, une fois les airbags dégonflés, de débarquer sur le sol martien même lorsque la configuration d'atterrissage est défavorable (présence de rochers sous la plate-forme…)[6]. Les airbags, gonflés juste avant l'atterrissage, sont utilisés pour amortir la chute finale. Ils sont du même type que ceux utilisés pour la mission Mars Pathfinder. Le rover est entouré de quatre airbags comportant chacun six lobes et réalisés avec plusieurs couches de vectran, un plus résistant que le kevlar[7].
Astromobile

Les deux astromobiles sont identiques, d'une hauteur de 1,5 m, une largeur de 2,3 m, une longueur de 1,6 m et une masse de 185 kg. Le cœur de l'astromobile est constitué d'un boîtier central de forme triangulaire réalisé en matériau composite en nid d'abeille qui abrite les composants devant être mis à l'abri des variations importantes de température qui règnent à la surface de Mars. Le dessus du boîtier est tapissé de cellules photovoltaïques et sert de support aux trois antennes de télécommunications. Un mât, qui culmine à 1,5 mètre de hauteur, porte la caméra panoramique à son extrémité supérieure, deux caméras de navigation et un spectromètre infrarouge. Trois panneaux solaires, situés de chaque côté du boîtier central, sont repliés durant le voyage et se déploient après l'atterrissage. Un bras robotisé (IDD) est fixé à l'avant du boîtier au bout duquel se trouvent deux spectromètres (Mössbauer et APXR), une caméra microscope ainsi qu'une meuleuse. Le boîtier repose sur un train de six roues, motorisées de manière indépendante, qui permet à l'astromobile de se déplacer sur le sol inégal de Mars[a 2].
Boîtier central
Les composants qui ne peuvent pas supporter les températures extrêmes de Mars (jusqu'à −105 °C) sont placés dans le boîtier central : on y trouve ainsi le cerveau de l'astromobile (l'ordinateur), la centrale à inertie, la partie électronique du spectromètre infrarouge du système de commande des moteurs des roues ainsi que les batteries qui doivent être maintenues à une température supérieure à −20 °C en utilisation et 0 °C en charge, etc. La température est régulée grâce à plusieurs dispositifs : radiateurs pour évacuer la chaleur, isolant constitué d'un aérogel de silice et d'une mince feuille d'or. Pour lutter contre le froid, huit pastilles contenant chacune 2,7 grammes de dioxyde de plutonium (Radio-isotope Heater Units ou RHU) produisent en permanence de la chaleur générée par la radioactivité. De la chaleur additionnelle est fournie à la demande par des résistances électriques. La chaleur dégagée par l'électronique embarquée contribue également à maintenir la température dans des limites tolérables.
Propulsion
L'astromobile utilise une suspension, baptisée rocker-bogie, mise au point par la NASA : celle-ci permet de franchir des obstacles d'une hauteur supérieure au diamètre des roues (26 cm). Le centre de masse abaissé du véhicule lui permet de rester stable sur une pente de 45°, mais le programme de navigation embarqué est paramétré de manière à éviter les pentes supérieures à 30°. Les six roues sont équipées chacune d'un moteur individuel. Chacune des quatre roues d'extrémité comporte également un moteur agissant sur la direction, ce qui permet à l'astromobile de pivoter sur lui-même[a 3]. Le véhicule peut progresser à une vitesse théorique de 5 cm par seconde (180 mètres à l'heure), mais en pratique ne peut dépasser 133 m/h quand sont pris en compte les changements de direction. Dans les cas les plus favorables, l'astromobile dispose d'énergie pour rouler durant quatre heures par jour martien[8].
Énergie
Les panneaux solaires, d'une superficie de 1,3 m2, sont constitués de cellules photovoltaïques à triple jonction, sélectionnées pour leur bon ratio rendement (28,3 %) sur masse (2,06 kg m−2). Ces panneaux peuvent fournir une puissance de 200 watts lorsque le Soleil culmine avec un ciel en grande partie dégagé de la poussière martienne. Dans ces conditions, les panneaux solaires peuvent fournir jusqu'à 1 kWh au cours d'une journée martienne, mais cette quantité peut chuter à moins de 200 Wh lors d'une tempête de poussière ou durant l'hiver martien. La poussière martienne qui s'accumule au cours du temps contribue également à réduire le rendement des panneaux solaires. Deux batteries lithium-ion constituées chacune de 8 cellules qui permettent de stocker 16 Ah à la tension de 32 volts permettent de restituer l'énergie produite lorsque la demande excède ce que peuvent fournir les panneaux solaires. La technologie lithium-ion a été retenue pour son excellent rapport énergie stockée/masse et sa capacité à supporter un grand nombre de cycles de charge/décharge ; par ailleurs, des développements effectués par la NASA ont permis la mise au point d'un électrolyte capable de supporter des températures de −30 °C[a 4],[9].
Équipements de communication
Contrairement au petit robot Sojourner de la mission Mars Pathfinder qui restait dépendant de son module d'atterrissage pour ses communications avec la Terre, les rovers MER disposent de leur propre système de communication. Les télécommunications jouent un rôle essentiel dans la mission MER. Comme toutes les sondes spatiales, la raison d'être des rovers est le recueil de données scientifiques qui doivent être ensuite acheminées vers la Terre. D'autre part, des échanges fréquents de photos et d'instructions sont nécessaires pour guider le rover sur le terrain, même si celui-ci dispose d'une capacité à identifier et éviter les obstacles en toute autonomie. Le rover peut utiliser deux méthodes pour transmettre des données : la transmission directe vers la Terre lorsque le rover peut pointer ses antennes vers celle-ci ou l'émission vers les sondes en orbite qui servent de relais. Ce dernier moyen permet un débit plus important et est privilégié[10]. Il était prévu initialement que les rovers utilisent un réseau de satellites de télécommunications placés en orbite autour de Mars pour communiquer avec la Terre (Mars Network). Mais le déploiement de ces satellites ne s'est pas réalisé et les rovers utilisent les orbiteurs existants : Mars Global Surveyor jusqu'à sa fin de vie en 2006, Mars Odyssey ainsi que Mars Reconnaissance Orbiter depuis son arrivée en orbite martienne en 2006[11]. La sonde européenne Mars Express a également servi de relais à titre expérimental.
Le transfert des données entre le rover et la Terre fait face à plusieurs contraintes. Le rover a un équipement de communication de puissance limitée. Il dispose d'une quantité d'énergie réduite par la surface de ses panneaux solaires et l'équipement de télécommunications a dû être allégé au maximum. Les orbiteurs ont par contre dans ce domaine plus de capacité grâce à la taille de leurs panneaux solaires et de leur équipement de télécommunication. Le débit de la transmission est donc généralement faible : il est compris entre quelques bits par seconde avec l'antenne faible gain du rover et 32 en utilisant l'antenne UHF et le relais des sondes qui orbitent autour de Mars. Pour que la transmission puisse avoir lieu, il faut que l'émetteur et le récepteur soient visibles l'un par l'autre : l'orbiteur Mars Odyssey qui a été utilisé pour le transfert de la majeure partie des données n'est visible que durant dix minutes à chacun de ses passages au-dessus du rover. La communication avec MRO qui orbite à plus basse altitude n'est possible que durant cinq minutes. Si le rover veut communiquer directement avec la Terre, il doit prendre en compte la rotation de la planète Mars et doit attendre si nécessaire de faire face à la Terre. Les communications directes vers la Terre sont, par ailleurs, limitées à trois heures par jour martien pour limiter la consommation d'énergie et l'échauffement de l'électronique[12]. Les rares antennes suffisamment puissantes sur Terre pour recevoir les émissions des sondes, dont le Deep Space Network de la NASA, doivent suivre un grand nombre de missions planétaires simultanées. Des créneaux horaires d'une heure sont alloués à chaque rover pour chaque jour martien pour les communications montantes (envoi d'instructions aux rovers, programme du jour) et descendantes (transfert de données scientifiques et de navigation)[13]. Une fois tous les deux ans, la Terre et Mars se trouvent en opposition par rapport au Soleil. Il en résulte un black-out total des communications avec le rover qui dure deux semaines : durant cette période, le rover ne se déplace plus et exécute un programme d'observation au voisinage de sa position[14].
Le rover dispose pour communiquer avec le contrôle au sol de trois antennes :
- une antenne grand gain (HGA) parabolique de 28 cm de diamètre est utilisée pour communiquer directement avec la Terre en bande X. La bande X est privilégiée sur les sondes spatiales car elle permet le transfert de volumes importants de données sans nécessiter de grandes quantités d'énergie. L'antenne peut être pointée avec précision vers la Terre grâce à deux moteurs fournissant deux degrés de liberté[15]. Son débit est de 11 kbit/s pendant trois heures par jour au maximum. Elle a été ajoutée à l'équipement du rover pour compenser l'abandon du réseau de satellites de télécommunications martiens. Pour que la masse du rover reste identique, il a fallu supprimer le spectromètre Raman, un des instruments scientifiques prévu dans la mission initiale[11] ;
- une antenne faible gain omnidirectionnelle (LGA) fixe permet également de communiquer directement avec la Terre également en bande X mais avec un débit très faible compris entre 7 et 10 bits/s ;
- une antenne UHF omnidirectionnelle de portée limitée est utilisée pour communiquer avec les orbiteurs américains Mars Global Surveyor et Mars Odyssey et MRO lorsqu'ils sont à la verticale du robot. Son débit est de 32 ko/s, pendant une ou deux sessions de quelques minutes par jour. Au cours d'un seul passage de huit minutes, le rover peut transférer 7,5 Mo de données. Le transfert du même volume de données par émission directe vers la Terre durerait d'une heure et demie à cinq heures[12].
Les deux robots Spirit et Opportunity utilisent des fréquences différentes, de manière à éviter toute confusion à la réception de leurs signaux sur Terre[11].
Système de navigation
.svg.png.webp)
Objectifs et contraintes
Pour remplir sa mission, le rover doit se déplacer sur le sol martien en évitant les obstacles, rechercher et identifier des échantillons de sol intéressants puis positionner avec précision ses instruments chargés de recueillir les données scientifiques : certains doivent être plaqués contre la roche à analyser (spectromètre Mössbauer et APXS), d'autres doivent être simplement pointés avec précision vers leur cible (caméras et spectromètre infrarouge). Le pilotage du rover à la surface de Mars comporte de nombreuses contraintes. L'échange de données par radio entre la Terre et Mars nécessite de 8 à 42 minutes en fonction de la position respective des deux planètes[16]. Il n'y a généralement qu'une seule vacation radio par jour martien entre le rover et les contrôleurs à Terre pour plusieurs raisons : le rover dispose d'une quantité d'énergie limitée à consacrer aux télécommunications, ces échanges utilisent comme relais un des orbiteurs martiens qui doit survoler le site du rover et le réseau d'antennes de réception sur Terre est peu disponible. De plus, la navigation du rover doit être très prudente, car aucune réparation n'est possible or le terrain martien est irrégulier (la garde au sol du rover est de 30 cm) et les zones géologiques intéressantes sont souvent situées dans des lieux escarpés[16]. Le rover dispose d'une quantité d'énergie limitée qui lui permet de rouler au plus 4 heures durant une journée martienne[8].
Compte tenu de la durée de vie limitée du rover et de la complexité des recherches géologiques entreprises, les concepteurs du rover ont voulu que celui-ci puisse franchir 100 mètres au cours d'une journée martienne. Avec les contraintes énoncées plus haut, cet objectif ne peut être atteint si un téléopérateur humain doit superviser chaque avancée du rover. Le recours à une série de commandes préparées à l'avance par le contrôle à Terre sur la base de photos prises par le rover et les orbiteurs martiens a ses limites : au-delà d'une certaine distance les informations disponibles sur les photos ne sont pas suffisamment précises, le rover peut circuler sur un terrain glissant qui fausse l'estimation de sa trajectoire réelle. Les concepteurs des rovers MER ont donc inclus dans le logiciel embarqué des fonctionnalités lui permettant de se déplacer de manière autonome vers son objectif[17].
Équipements du logiciel de navigation
Le logiciel de navigation utilise, pour déterminer la trajectoire, des données fournies par plusieurs capteurs. Une centrale à inertie comportant 3 accéléromètres et trois gyromètres donne la direction (il n'y a pas de champ magnétique ni de système de navigation par satellites sur Mars). Au bout de quelques heures, un écart de plusieurs degrés peut apparaître entre l'orientation réelle et l'orientation déterminée à l'aide de la centrale à inertie. Pour pallier cette dérive, une caméra est pointée vers le Soleil pour fournir le relèvement de celui-ci. L'orientation réelle est alors calculée en utilisant cette information, combinée avec l'heure solaire locale et la direction de la verticale locale (fournie par l'accéléromètre)[18]. Un odomètre utilise le nombre de tours de roue pour fournir la distance parcourue. Des détecteurs placés sur le châssis permettent de déterminer si le véhicule se trouve dans une position dangereuse (inclinaison importante, suspension fortement sollicitée). Un ensemble de huit caméras fournit des informations sur le terrain environnant[16] :
- deux paires de caméras monochromes permettant d'obtenir des images en relief, destinées à détecter les obstacles sur le parcours de l'appareil : une paire située à l'avant du rover (Front Hazcam), à 52 cm de hauteur au niveau du pont du rover sert également à observer le fonctionnement du bras robotisé ; l'optique est un objectif grand angle de 125° ; une deuxième paire située à l'arrière du rover (Rear Hazcam) joue un rôle identique ;
- une paire de caméras grand angle (Navigation Camera ou NavCam), placée en haut du mât, est utilisée pour la navigation ; l'optique a un angle de vue de 45° et permet d'obtenir des images de qualité entre 2 et 20 mètres de distance ;
- la paire de caméra PanCam couleur, utilisée également pour les travaux scientifiques, est dotée d'un téléobjectif (18°) et permet d'obtenir des images exploitables pour la navigation jusqu'à 50 mètres.

Logiciel de navigation
Lorsque la trajectoire est définie par le contrôle à Terre (mode Direct Driving), une série d'instructions décrivant le parcours à suivre, décomposé en segments (distance + direction), est téléchargée en début de journée puis exécutée de manière séquentielle. Le déplacement peut être interrompu si le rover détecte à l'aide de ses capteurs une situation à risques (inclinaison trop importante…) ou si le temps alloué au déplacement est dépassé ou si l'engin a une défaillance mécanique.
Lorsque le rover circule de manière autonome, le logiciel de navigation du rover comporte trois fonctions qui optimisent le déroulement et limitent le risque associé à ce mode[17] :
- le système de détection des obstacles (Terrain Assessment) utilise les caméras Hazcam pour identifier les obstacles situés sur sa trajectoire ;
- le système de sélection de trajectoire (Path Selection) permet au rover de choisir sa trajectoire vers la cible, en tenant compte de sa position estimée à l'aide des capteurs et des données fournies par les deux autres fonctions si elles sont activées ;
- le système d'odométrie visuel (Visual Odometry) permet au rover de déterminer avec précision sa position en comparant des photos prises à intervalle rapproché. Cette fonction est utilisée notamment lorsque le rover se trouve sur un terrain glissant (du fait de la nature du sol ou de la pente) qui entraîne des erreurs importantes sur la position calculée.
La combinaison de ces fonctions permet d'obtenir plusieurs modes de navigation autonome. Le mode est choisi en fonction de la nature du terrain et de la distance à la cible. Au cours des 18 premiers mois de la mission, les deux rovers ont utilisé essentiellement les modes de navigation suivants[17],[8] :
- Blind Goto Waypoint (~40 % de la distance franchie) : seul le système de sélection de trajectoire est activé. Ce mode est utilisé lorsque le rover doit parcourir de grandes distances en terrain plat. La vitesse de déplacement maximale est d'environ 133 mètres par heure ;
- Autonav (~25 %) : le système de sélection de trajectoire et celui de détection d'obstacles sont activés. Ce mode est utilisé sur des terrains plus délicats lorsque la pente n'est pas trop forte. La progression se fait par pas de 50 cm mais lorsque le terrain n'est pas trop encombré, la détection d'obstacles n'est effectuée que tous les 1,5 à 2 mètres. La vitesse de progression est comprise entre 12 et 35 mètres par heure ;
- Visodom (~9 %) : seul le système d'odométrie visuel est activé. Ce mode est utilisé pour les parcours d'approche en terrain très pentu. Le rover avance par pas de 60 cm et prend à chaque fois des photos pour recaler sa position. La vitesse de déplacement est d'environ 12 mètres par heure ;
- Direct Driving (~25 %) : dans ce mode, le rover n'est pas autonome et exécute les instructions du contrôle au sol. Une phase d'avancement en mode Autonav est souvent programmée à la fin de son exécution.
Le recours au mode Visodom et AutoNav est limité par la faible puissance du microprocesseur cadencé à 20 MHz qui doit exécuter en parallèle jusqu'à 90 tâches même si, en général, 75 % du temps machine peut être consacré aux fonctions de navigation. Le traitement d'une photo pour les besoins de la navigation dure de deux à trois minutes et nécessite un arrêt complet de la progression du rover pour que le résultat des calculs puisse être exploité avant d'être périmé[8],[18].
Planification d'une journée de navigation
La planification d'une journée de navigation est effectuée par les équipes au sol du JPL, qui regroupent des scientifiques qui identifient les cibles intéressantes et dépouillent les résultats et des ingénieurs chargés de préparer les instructions à exécuter par les rovers et de surveiller le déroulement des opérations. Le rover opère lorsque le Soleil est au plus haut. À l'issue de sa journée de travail, il transmet à l'équipe sur Terre des photos qui vont servir à identifier des objectifs scientifiques et à préparer la route du lendemain. Au cours du processus de préparation, des arbitrages sont effectués pour prendre en compte les besoins en énergie, échanges radio et les capacités du rover (pente…)[8].
Durant la première phase de la mission MER, l'ensemble de l'équipe au sol travaillait à l'heure martienne sept jours sur sept avec un décalage de 40 minutes chaque jour par rapport à l'heure terrestre. Ce rythme épuisant a été abandonné dès la première extension de la mission 90 jours après l'atterrissage : le temps de préparation qui nécessitait chaque jour 18 heures a été fortement réduit par la création de séquences de commandes et grâce à l'expérience acquise. Par la suite, une optimisation plus poussée du processus avec un système de distribution automatisé des tâches et une dématérialisation quasi complète des supports de communication a permis aux scientifiques de réintégrer leur entité d'origine tout en maintenant leur participation au projet[8].
Instruments scientifiques

Les caméras panoramiques (PanCam)[19] de haute résolution sont fixées au sommet du mât vertical porteur d'instruments. Chacun de ces instruments est équipé d'un capteur CCD de 1 024 pixels sur 1 024 pixels. Ce dispositif permet de réaliser des images en relief et de repérer les roches et les sols intéressants pour une analyse ultérieure à l'aide des autres appareils de mesure. La PanCam est équipée de :
- huit filtres montés sur une roue permettant des captures d'images à des longueurs d'onde de 0,4 à 1,1 micromètre ;
- deux filtres solaires sont utilisés pour mesurer l'absorption du rayonnement solaire par les poussières présentes dans l'atmosphère de Mars ;
- des filtres permettent d'étudier le spectre infrarouge avec l'objectif droit de la Pancam ;
- des filtres permettent d'étudier le spectre en lumière visible avec l'objectif gauche de la Pancam.
Chaque robot transporte également trois spectromètres :
- un spectromètre infrarouge miniature d'émission thermique (Mini-TES)[20], pour étudier la composition minéralogique des roches et des sols, en mesurant le rayonnement naturel infrarouge émis par ces objets. Cet appareil est fixé sur le mât de chaque rover, à côté de la caméra panoramique ;

- un spectromètre Alpha Particle Rayons X (APXS)[21], développé par l'Institut Max-Planck de chimie de Mayence en Allemagne, employé pour des analyses rapprochées de l'abondance des éléments constitutifs des roches et du sol. Les sources radioactives de Curium 244 de cet appareil bombardent de particules alpha et de rayons X le substrat à étudier. Ensuite, il analyse soit les rayons X émis par les éléments les plus lourds, soit les particules alpha réfléchies par les éléments les plus légers (carbone, oxygène, azote mais pas hydrogène et hélium). Cet instrument est fixé au bout du bras robotisé[22] ;
- un spectromètre Mössbauer MIMOS II[23], élaboré par le Dr Göstar Klingelhöfer de l'université Johannes Gutenberg de Mayence, en Allemagne, employé pour l'examen rapproché de la minéralogie des roches et des sols. Cet appareil utilise un rayon gamma pour mesurer la présence de minéraux riches en fer et leur état d'oxydation. Il est placé au bout du bras robotisé[24] ;

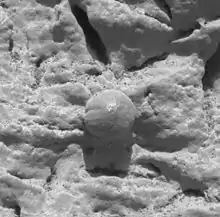
- un outil d'abrasion des roches (RAT)[25], qui permet d'enlever la poussière et la surface des roches à étudier sur un diamètre de 4,5 cm, et une profondeur de 5 mm, grâce à une meule constituée d'éclats de diamants fixés sur une résine solide. Cet instrument permet d'étudier les roches en évitant les biais liés à la poussière ou à une altération de surface. Il est disposé au bout du bras robotisé. L'image ci-contre montre une vue en gros plan prise par la caméra microscope du robot Spirit, d'une zone abrasée par l'outil RAT du rocher Mazatzal, le jour Sol 82 de la mission MER A sur Mars ;
- une caméra microscope (Microscopic Imager)[26], placée sur le bras robotisé, permettant d'obtenir des gros plans d'une résolution de 20 à 40 micromètres par pixel. Pour que la mise au point soit correcte, le microscope est maintenu à une distance fixée de la surface photographiée grâce à une petite tige métallique qui fait saillie ;
- 7 aimants destinés à piéger les particules magnétiques[27], et à les étudier à l'aide de la caméra panoramique, de la caméra microscope, et des spectromètres Mössbauer et APXS. Le dispositif de capture magnétique est constitué d'un cylindre central et de trois anneaux, ayant chacun une orientation magnétique alternée. L'ensemble constitue un cylindre de 4,5 cm de diamètre. Les poussières s'accumulent au fil du temps, au fil des captures des particules en suspension dans l'air martien, qui est très riche en poussières. Comme les différents aimants ont des puissances différentes, les plus faibles ne capturent que les particules plus magnétiques, alors que les plus forts les capturent presque tous. En revanche, il ne sera pas possible de savoir quelle est l'origine précise d'un ensemble donné de poussières.
Équipement informatique
L'équipement informatique du rover est utilisé durant toutes les phases de la mission à partir du lancement de la sonde. Il gère en particulier la navigation astronomique et les corrections de trajectoire durant le voyage Terre-Mars, les opérations de séparation de l'étage de croisière et du module de rentrée, les différentes tâches qui s'enchainent durant la phase de rentrée et d'atterrissage et le déploiement du rover après l'atterrissage. Sur le sol martien, compte tenu de l'éloignement de la Terre qui nécessite une grande autonomie du rover, l'ordinateur est fortement sollicité : il doit collecter les données télémétriques sur l'état du rover, gérer les communications en jonglant avec les 3 modes existants et les fenêtres s'ouvrant au passage des orbiteurs, exécuter les instructions du sol touchant aux déplacements et à la mise en œuvre des instruments scientifiques, compresser les données recueillies pour optimiser le volume de données à transférer et lorsque le rover progresse en mode autonome, effectuer les calculs déterminant la meilleure route à suivre[28].
Le système informatique repose sur un unique microprocesseur RAD 6000 de type RISC 32 bits, qui peut traiter 20 millions d'instructions par seconde. Cette version du processeur PowerPC est durcie pour résister à l'effet néfaste des radiations. Elle utilise 128 Mio de mémoire vive de type DRAM, 256 Mio de mémoire flash et 3 Mio de mémoire morte de type EEPROM (mémoire non volatile). Le système d'exploitation est VxWorks, un système d'exploitation temps réel de la firme Wind River, déjà employé pour les missions Mars Pathfinder et Stardust[29].
Le logiciel est en partie hérité de la mission Mars Pathfinder et de manière marginale de Deep Space 1, Mars 98 et Mars Odyssey. Il est écrit essentiellement en langage C complété de quelques modules en C++, et il représente 305 000 lignes de code occupant avec le système d'exploitation un volume de mémoire de 11 mégaoctets. Le logiciel est décomposé en modules indépendants se répartissant en cinq couches : interfaces avec les composants physiques du rover (moteurs, antennes…), pilotage de ces composants, application, gestion de la sonde, de la charge utile et de la mission, gestionnaire d'événements. Les tâches communiquent entre elles à l'aide de messages point à point transportant l'ensemble du contexte, sauf cas particulier (traitement des images)[28].
Trajet Terre-Mars


Lanceur
Les deux sondes MER sont lancées depuis les pas de tirs 17A et 17B de la base de lancement Cap Canaveral dans l'État de Floride aux États-Unis[30]. La NASA a choisi d'utiliser des lanceurs Delta II à trois étages, qui sont fréquemment utilisées pour le lancement de sondes spatiales. La mission MER-A Spirit est lancée par une version 7925 de la fusée, qui bénéficie d'une grande fiabilité et a, par ailleurs, contribué au succès des missions précédentes comme Mars Odyssey (2001), Mars Global Surveyor et Mars Pathfinder (1996). La mission MER-B Opportunity est quant à elle placée sur un modèle de fusée 7925H dit lourd (« Heavy ») car elle doit décoller quatre semaines plus tard, se trouvant donc dans une configuration Terre-Mars moins favorable, ce qui nécessite plus d'énergie pour atteindre Mars.
Lancement et différentes phases du vol propulsé
La sonde MER-A Spirit est lancée le et la sonde MER-B Opportunity le de la base de lancement de Cap Canaveral. La fenêtre de lancement de chaque sonde a une durée de trois semaines. Lors du décollage des deux fusées, le moteur du premier étage s'allume ainsi que six des propulseurs d'appoint (les trois propulseurs restants prennent la relève une fois que ceux-ci ont épuisé leur carburant). Après environ 4 min 23 s, le premier étage est largué et le second étage est allumé. Peu après, la coiffe de la fusée est larguée. Le moteur du second étage est arrêté une première fois, environ dix minutes après le décollage pour la sonde MER-A Spirit et neuf minutes pour la sonde MER-B Opportunity. Après une phase de vol balistique non propulsé sur une orbite à peu près circulaire, le second étage est brièvement rallumé pour allonger l'orbite. Un mouvement de rotation (63 tours par minute) est ensuite imprimé au lanceur pour accroître la stabilité de l'orientation du troisième étage durant son fonctionnement. Celui-ci, qui est chargé d'insérer la sonde sur sa trajectoire vers Mars, est alors mis à feu après que le deuxième étage a été largué. Une fois la phase propulsive achevée, la rotation est annulée à l'aide d'un yoyo et le troisième étage est largué. L'orientation de la sonde et les manœuvres de correction de trajectoire sont alors prises en charge par son étage de croisière[31],[a 5].
Transit Terre-Mars

Pour parvenir à leur destination, les sondes MER effectuent un voyage d'environ six mois et parcourent 500 millions de kilomètres[a 6] en suivant une orbite elliptique qui tangente la planète Mars (orbite de Hohmann). Cinq manœuvres de correction de trajectoire sont prévues durant ce transit dont la dernière, facultative, est exécutée le jour de l'arrivée pour améliorer la probabilité de poser l'atterrisseur près du site martien visé[32].
Le guidage de la sonde durant son trajet vers Mars nécessite de déterminer sa position avec une grande précision. La trajectoire n'est pas purement inertielle : elle est notamment modifiée par la pression de radiation, qui génère une dérive de 4 km en dix jours. Pour déterminer la position des sondes MER, la NASA utilise des techniques traditionnelles : la distance entre la sonde et la Terre est mesurée à partir du temps mis par une onde radio pour faire l'aller-retour, tandis que la vitesse de la sonde par rapport à la Terre est obtenue par mesure de l'effet Doppler. Pour cette mission, l'agence spatiale américaine met également en œuvre une nouvelle technique permettant de mesurer le vecteur vitesse perpendiculaire à l'axe Terre-sonde, ce qui permet d'améliorer la précision de l'atterrissage des rovers sur la planète Mars. Cette technique, baptisée DDOR (Delta Differential One-way Range, ou « variation différentielle directe de la distance »), fait appel à deux antennes du réseau de stations de la NASA séparées en latitude de 120°. Les antennes relèvent simultanément la position de la source de l'émission radio émise par la sonde et celle d'un quasar, dont la position est connue à quelques milliardièmes de degrés près[32].
Atterrissage sur Mars

Scénario d'atterrissage
La rentrée dans l'atmosphère et l'atterrissage sur Mars durent en tout six minutes. Cette phase, dite « Entry, Descent and Landing » ou EDL dans la terminologie de la NASA, est particulièrement complexe et délicate. Les sondes arrivent à proximité de Mars avec une vitesse relative d'environ 5,5 km/s (près de 20 000 km/h) qui doit être annulée pour réussir l'atterrissage. Le recours exclusif à des fusées pour annuler n'est pas possible car il nécessiterait qu'une grande partie de la masse de la sonde soit consacrée au carburant. Les sondes MER utilisent successivement quatre méthodes pour se freiner.
Comme pour une rentrée atmosphérique sur Terre, la sonde utilise principalement les forces de traînée, c'est-à-dire le frottement de l'atmosphère, pour faire chuter sa vitesse : 99,6 % de l'énergie cinétique accumulée est dissipée par ce moyen. La densité très faible de l'atmosphère martienne, environ cent fois inférieure à celle de la Terre, nécessite le déploiement d'un parachute alors que la sonde se déplace encore à la vitesse supersonique de Mach 1,77 : le parachute permet d'éliminer 98 % de l'énergie cinétique restante. La vitesse ne devient inférieure à Mach 1 que lorsque le vaisseau est très près du sol ; la sonde doit annuler la vitesse résiduelle en utilisant des fusées. Enfin, sur les derniers mètres, elle utilise des coussins gonflables. La méthode de rentrée atmosphérique et d'atterrissage employée reprend la technique utilisée pour Mars Pathfinder, avec des aménagements : il faut en effet poser 830 kg sur le sol martien contre 583 kg pour Mars Pathfinder ; par ailleurs, à la suite des échecs de 1998-1999, un atterrissage de jour a été retenu car il permet à l'équipe du contrôle sur Terre de recevoir les émissions de l'atterrisseur mais cela pénalise la sonde car l'atmosphère est moins dense et les vents sont plus forts en journée[33]. La méthode utilisée atteint ses limites avec les astromobiles MER : la sonde Mars Science Laboratory, trois fois plus lourde, utilise une technique différente.
Mars 3 Viking 1 Viking 2 Perseverance Beagle 2 Schiaparelli Mars 6 Mars 2 |
Incidence des contraintes techniques sur le choix du site d'atterrissage
Les sites d'atterrissage sont d'abord choisis pour leur intérêt géologique mais les contraintes techniques jouent un rôle essentiel dans la sélection initiale. Une grande partie de Mars, située en altitude, ne permet pas l'atterrissage, car la sonde aurait encore trop de vitesse à son arrivée au sol ; l'altitude maximum pour les rovers MER est fixé à 1,3 km au-dessous du niveau moyen de Mars. Les deux sites retenus pour les sondes MER sont situés à une altitude respectivement de 1,9 km et 1,4 km au-dessous du niveau moyen de la planète soit tout de même 2 km « plus haut » que le site d'atterrissage de Mars Pathfinder (3,5 km au-dessous du niveau moyen). D'autres conditions sont requises pour que les airbags ne crèvent pas : une pente inférieure à 2 % à grande échelle (1 km) et à 15 % localement (5 m), la densité de rochers doit être inférieure à 20 %. La taille des rochers doit être limitée pour permettre le déploiement du rover au sol. Pour bénéficier d'un apport d'énergie suffisant du Soleil, les rovers doivent se poser à moins de 15° de latitude donc près de l'équateur. Enfin, pour que les rovers n'utilisent pas au même moment le satellite relais pour les télécommunications avec la Terre, les deux sites d'atterrissage doivent être séparés d'au moins 37° en longitude[34].
Précision de l'atterrissage
Les sondes MER effectuent une rentrée directe, sans se placer auparavant en orbite autour de Mars, ce qui nécessite une navigation particulièrement précise car aucune correction ne peut être effectuée une fois que la phase de rentrée dans l'atmosphère martienne est entamée : en effet, la coquille dans laquelle est enfermée le rover et le module d'atterrissage a une portance nulle et cette phase du vol est donc purement balistique contrairement à la sonde Mars Science Laboratory qui a été lancée en . Durant les tempêtes qui touchent fréquemment Mars, la densité de l'atmosphère martienne diminue de manière importante (jusqu'à 10 %) et difficilement prévisible. Des vents qui peuvent être violents peuvent avoir une incidence importante sur la trajectoire de la sonde. Enfin, le comportement de la sonde durant la phase de freinage atmosphérique ajoute une marge d'erreur. La sonde est dépourvue de moyens de compenser ces phénomènes une fois la rentrée atmosphérique entamée. Compte tenu de tous ces facteurs d'incertitude, les calculs indiquent que le module d'atterrissage doit se poser dans une ellipse de 80 × 12 km centrée sur le point visé avec une probabilité de 99 % : parmi les facteurs énumérés, le vent peut entraîner un déport longitudinal et latéral du site d'atterrissage de plus ou moins 4 km (pour une vitesse de 20 m/s), la densité de l'atmosphère de plus ou moins 12 km en longitudinal et le rebond des airbags de 1 km sur les deux axes[35],[34].
| Caractéristiques | Viking 1 | Mars Pathfinder | Mars Explorer Rover | MSL (2012) |
|---|---|---|---|---|
| Masse au début de la rentrée atmosphérique | 992 kg | 584 kg | 827 kg | 2 800 kg |
| Masse à l'atterrissage | 590 kg | 360 kg | 539 kg | 1 541 kg |
| Masse du rover | - | 10,5 kg | 185 kg | 900 kg |
| Ratio portance/trainée | 0,18 | 0 | 0 | 0,22 |
| Diamètre du parachute | 16 m | 12,5 m | 14 m | 19,7 m |
| Vitesse à l'ouverture du parachute | Mach 1,1 | Mach 1,57 | Mach 1,77 | Mach 2 |
| Vitesse verticale et horizontale à l'atterrissage | Vv 2,4 m/s Vh < 1 m/s | Vv 12,5 m/s Vh < 20 m/s | Vv 8 m/s Vh 11,5 m/s | Vv = 0,75 m/s Vh < 0,5 m/s |
| Précision de l'atterrissage | 280 × 180 km | 200 × 100 km | 80 × 12 km | 20×20 km |
Chronologie de l'atterrissage


Environ 84 minutes avant que la sonde pénètre dans l'atmosphère martienne, elle manœuvre pour orienter le bouclier thermique vers l'avant. Désormais, les panneaux solaires de l'étage de croisière, qui ne sont plus tournés vers le Soleil, ne fournissent plus d'énergie électrique et le fonctionnement de la sonde repose jusqu'au déploiement du rover sur cinq batteries stockées dans l'atterrisseur[32]. L'étage de croisière, qui a rempli son office, est largué environ 15 minutes avant le début de la rentrée atmosphérique. À partir de ce moment et jusqu'au déploiement des antennes du rover après l'atterrissage, la sonde communique avec la Terre en utilisant une antenne à bas gain omnidirectionnelle au débit très faible : le statut de la sonde aux différentes phases du vol est communiqué en faisant uniquement varier la fréquence de l'émission. La sonde MER aborde l'atmosphère martienne, dont la limite est située conventionnellement à 120 km, à la vitesse de 19 000 km/h et avec un angle de pénétration de 11,5° donc presque tangent à la surface de l'atmosphère[N 1]. La forme du bouclier thermique, un cône de révolution avec un demi-angle de 70°, est un héritage du programme Viking, qui permet de maintenir l'orientation de la sonde en l'absence de système de stabilisation actif tout en évacuant la chaleur. La trainée engendrée par le frottement de l'engin dans la couche peu dense de gaz provoque une décélération qui culmine à 7 g, correspondant à un ralentissement de plus de 4 000 km/h par minute. Le bouclier thermique est porté à une température de 1 500 °C[37].
Le déploiement du parachute à l'aide d'un mortier est déclenché par l'ordinateur de la sonde lorsque la pression aérodynamique (déterminée par la centrale à inertie) devient inférieure à 700 N/m2 : si le déroulement est nominal, l'ouverture a lieu environ 244 secondes après le début de la rentrée atmosphérique alors que l'engin se trouve à 9,5 km d'altitude. 20 secondes plus tard, le bouclier thermique avant est largué puis, 10 secondes plus tard, le module d'atterrissage se désolidarise du bouclier arrière et est descendu le long d'un câble d'environ 20 mètres de long afin de placer les coussins gonflables hors de portée des flammes des rétrofusées qui sont chargées d'annuler à la fin de la descente la vitesse résiduelle. De plus, cette configuration pendulaire réduit le risque que les suspentes du parachute viennent s'emmêler dans le module d'atterrissage du fait des turbulences de l'atmosphère martienne[37].
Alors que la sonde est située à environ 2 500 m du sol, un radar altimètre, monté sous le module de descente, effectue plusieurs évaluations de la distance au sol qui sont intégrées par le logiciel de navigation pour déterminer la vitesse verticale et en déduire la durée de fonctionnement des rétrofusées. Trois photos sont prises successivement à des altitudes différentes et le logiciel utilise un système de reconnaissance de forme pour en déduire la vitesse horizontale. Une demi-seconde avant la mise à feu des rétrofusées, les airbags sont gonflés. Les rétrofusées (RAD : Rocket Assisted Deceleration) sont mises à feu alors que le module de descente est situé à environ 12 mètres du sol. Pour réduire la vitesse horizontale, trois autres rétrofusées dites TIRS (Transverse Impulse Rocket System) peuvent être éventuellement mises à feu de manière synchronisée. Ce dernier dispositif n'existait pas sur Mars Pathfinder : il a été ajouté car, compte tenu du poids plus élevé des sondes MER, une vitesse horizontale résiduelle trop importante pourrait entraîner une déchirure des airbags [N 2]. Lorsque la vitesse est pratiquement annulée, la bride qui retient le module d'atterrissage est coupée et celui-ci chute sur le sol : le choc est amorti par les airbags et le module rebondit une première fois à 15 mètres de haut ; en fonction du relief, l'astromobile peut s'immobiliser au bout d'une minute et après avoir parcouru jusqu'à 1 km. Le bouclier arrière toujours propulsé par les rétrofusées reprend de l'altitude après sa séparation avec le module de descente et va s'écraser un peu plus loin[37],[38],[33].
Douze minutes après le premier contact avec le sol, les airbags sont dégonflés puis rétractés à l'aide de vérins. Environ une heure plus tard, les pétales métalliques qui protègent l'astromobile sont ouverts : à l'aide des accéléromètres de l'astromobile, l'ordinateur embarqué détermine dans quelle position se trouve l'astromobile par rapport à l'horizontale et, si nécessaire, commande d'abord l'ouverture du pétale qui replacera l'engin dans une position adéquate. L'astromobile, qui était stocké replié pour occuper le moins de place possible, se met en condition opérationnelle : les panneaux solaires sont déployés à l'horizontale, les fixations qui solidarisaient l'astromobile avec le module d'atterrissage sont défaites par de petites charges pyrotechniques, les roues sont déployées, le châssis se relève, les antennes de télécommunications et le mât qui porte la caméra panoramique sont mis en position verticale. Après avoir reçu un panoramique des environs réalisé par l'astromobile au début de cette séquence, le contrôle sur Terre donne l'ordre à l'engin de descendre en empruntant l'une des rampes souples (batwing) tendues entre les pétales choisie en fonction de la configuration du terrain[32],[6].
Déroulement de l'atterrissage de Spirit et Opportunity
Les atterrissages de Spirit et d'Opportunity se sont déroulés conformément aux attentes de leurs concepteurs. L'erreur d'angle avant la rentrée atmosphérique est de 0,01° (Spirit) et 0,02° (Opportunity). Une tempête de poussière est en cours à l'arrivée des deux sondes : pour compenser la densité plus faible de l'atmosphère martienne liée à cet événement, le paramètre commandant le déploiement du parachute est modifié pour que celui-ci s'ouvre plus tôt[N 3]. Selon les estimations, la densité de l'atmosphère est de 8 % plus faible que la normale au moment de la décélération maximale de Spirit et de 12 % pourOpportunity. Les atterrisseurs de Spirit et Opportunity se sont posés tous deux sans encombre environ 15 km en arrière du point visé comme on pouvait le prévoir avec une atmosphère de densité plus faible[37].
Astromobiles MER sur le sol martien
Spirit
Mission principale (2004)
Le module d'atterrissage du robot Spirit se pose le à une latitude de 15° au sud de l'équateur dans le cratère Gusev formé par l'impact d'une météorite de grande taille il y a plusieurs milliards d'années. Le cratère d'un diamètre de 145 km, porte le nom de Matveï Goussev, un astronome russe du XIXe siècle.

Ce site d'atterrissage a été choisi parce qu'il se situe au débouché de la vallée Ma'adim longue de 900 km qui a sans doute été formée par l'érosion fluviale. À l'époque, les flots se seraient frayés un chemin à travers la bordure du cratère et un lac aurait occupé une partie du cratère. En choisissant cet emplacement, les scientifiques espèrent trouver des traces des sédiments déposés par les eaux du lac qui permettraient de déterminer les conditions qui régnaient à l'époque[a 7].
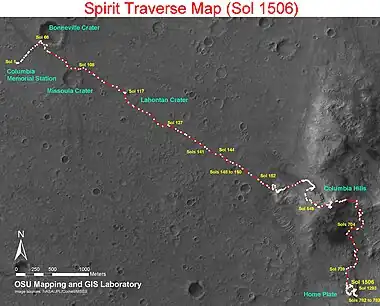
L'espoir de découvrir des traces d'une sédimentation lacustre est rapidement déçu : Spirit détecte essentiellement du basalte d'origine volcanique. Les sédiments existent peut-être mais sont enfouis sous des matériaux plus récents. Par ailleurs, le site d'atterrissage de Spirit ne présente aucun affleurement rocheux qui permettrait d'étudier le sous-sol. Le , le rover est dirigé vers un cratère d'impact de 192 m de diamètre nommé Bonneville, avec l'espoir que celui-ci soit suffisamment profond pour que des affleurements de roches y apparaissent[39]. Sur le trajet, Spirit est arrêté au milieu de la dépression baptisée Laguna Hollow. Les opérateurs sur Terre veulent tenter de faire apparaître la couche de sédiment qui est peut-être enfouie sous la couche de sable superficielle qui recouvre le site : le rover pivote sur une roue tandis que les autres roues, maintenues bloquées, creusent le sol. La manœuvre ne met au jour rien d'intéressant.
Après avoir parcouru 250 mètres depuis le site d'atterrissage, Spirit parvient au cratère Bonneville. Celui n'est pas assez profond pour laisser apparaître des affleurements rocheux. L'impact de la météorite n'a pas été suffisant pour que les éjectas proviennent de la sous-couche volcanique. Le rover entame ensuite un long trajet vers les collines Columbia, le relief le plus proche, distant de 2,3 km, toujours dans l'espoir de trouver des affleurements rocheux.
Collines Columbia (2004-2006)
Spirit atteint la base des collines Columbia en . En un peu plus d'un an et en parcourant 4,81 km, Spirit parvient à se hisser le sur la plus haute des collines Columbia baptisée Husband Hill. Sur son trajet, le rover étudie de nombreuses roches situées sur les flancs des collines et trouve des traces de l'action de l'eau sous forme liquide. Durant son ascension, les panneaux solaires du rover, qui se sont progressivement recouverts de poussière depuis l'atterrissage, retrouvent toute leur efficacité grâce à l'action des tourbillons de poussière martiens[40]. Le rover entame la descente vers la plaine et atteint en un affleurement rocheux remarquable en forme de plateau situé au pied des collines baptisé Home Plate. Cet ensemble semble constitué de plusieurs couches rocheuses d'origine volcanique.

Home Plate (2006-2008)

Après avoir travaillé aux abords de Home Plate, Spirit est dirigé vers la colline McCool Hill mais mi- sa progression est ralentie par le blocage de la roue avant droite. Après avoir fait avancer le rover en marche arrière pour compenser la roue bloquée, l'équipe au sol décide d'immobiliser Spirit le sur une arête rocheuse baptisée Low Ridge Haven pour que le rover y passe l'hiver. Durant huit mois, Spirit, qui a jusque-là parcouru 6,9 km, reste immobile en attendant que l'ensoleillement redevienne suffisant pour recharger ses batteries et progresser à nouveau. En , Spirit est de nouveau opérationnel mais la roue avant droite est toujours coincée et le rover doit avancer à reculons. La roue bloquée freine le rover car elle creuse un sillon dans le sol martien ; fin , ce comportement handicapant permet de faire apparaître sous la couche superficielle un sol inhabituel composé de 90 % de silice ; or, les mécanismes de formation de ce matériau nécessitent un milieu aqueux favorable à la vie[41],[42]. Entre juillet et , le rover affronte de violentes tempêtes de poussière qui obscurcissent le ciel, mais Spirit survit à cet épisode. Fin 2007, le rover a franchi jusque-là 7,5 km et est immobilisé au nord de Home Plate pour y passer l'hiver. La position du rover est optimisée de manière que l'inclinaison des panneaux solaires par rapport à l'horizontale atteigne 30° afin de lui permettre de capter dans la position la plus favorable le rayonnement solaire déclinant. L'énergie générée ne doit pas chuter sous la valeur de 150 Wh par jour pour que le rover puisse se maintenir en état de fonctionnement (55 Wh pour les résistances du spectromètre, 29 Wh pour celles des batteries, le reste étant utilisé par l'ordinateur, etc.)[43]. En , Spirit se remet en route malgré un hiver prolongé en raison de mauvaises conditions atmosphériques.
Spirit définitivement immobilisé (2009)
En , Spirit entame un long trajet qui doit l'amener vers deux formations géologiques baptisées « Goddard » et « von Braun ». Comme la route la plus courte à travers le plateau Home Plate n'est pas accessible, l'équipe au sol choisit de contourner Home Plate par le nord puis l'ouest avant de diriger le rover vers ses nouveaux objectifs. Alors que Spirit est en route vers von Braun, début mai ses roues s'enfoncent dans une couche de sable et le rover ne parvient pas à se dégager[43]. L'équipe du JPL essaie de trouver une solution pour libérer Spirit en simulant sur Terre les manœuvres à effectuer à l'aide d'un modèle du rover placé sur une reproduction du sol martien. Plusieurs tentatives sont exécutées en essayant de faire reculer ou avancer prudemment Spirit, mais toutes échouent. Début 2010, la NASA renonce à libérer Spirit : le rover, qui a parcouru depuis son atterrissage 7 730,5 mètres, agit désormais en tant que station de mesure fixe.
Mais l'hiver martien approchant (le solstice de l'hiver martien est le ), la quantité d'énergie disponible chute fortement. Or Spirit, immobilisé, ne peut pas orienter ses panneaux solaires de manière optimale. Le , le satellite Mars Odyssey, qui relaie les liaisons radio de Spirit, signale qu'il n'a pas reçu l'émission radio programmée de Spirit. Le rover, qui ne recevait plus que 134 Wh par jour lors de la dernière communication réussie, s'est sans doute mis en sommeil pour ne pas descendre au-dessous d'un seuil d'énergie critique pour ses fonctions vitales. Mi-, malgré l'augmentation de l'énergie solaire reçue par les panneaux solaires, le rover est toujours silencieux[44]. Le , la NASA met fin à ses tentatives pour contacter le robot.
Opportunity
Mission principale (2004)
Le rover Opportunity se pose le sur Meridiani Planum. Le nom de Meridiani vient de la proximité de cette zone avec le méridien « zéro » de Mars (longitude 0°), alors que Planum signifie « plaine ». Ce plateau a été retenu comme site d'atterrissage parce que le spectromètre embarqué à bord de l'orbiteur martien Mars Global Surveyor a détecté que cette région était particulièrement riche en une des formes d'oxyde ferreux appelée hématite grise. Or, sur Terre, ce minerai se forme généralement, mais pas toujours, en présence d'eau liquide. L'objectif de la mission est de chercher des indices d'une formation de l'hématite par voie sédimentaire (dépôts laissés par un lac), ou du fait d'une activité hydrothermale[a 7].
Opportunity, plus chanceux que Spirit, s'immobilise après son atterrissage au centre d'un petit cratère d'impact de 22 m de diamètre, baptisé Eagle, dont les bords présentent des affleurements rocheux. Cette disposition des lieux a permis de conduire rapidement des études sur la nature et l'histoire du sous-sol rocheux du site. Les instruments scientifiques recueillent de nombreux indices qui prouvent qu'une partie des roches visibles se sont formées en partie sous l'action de l'eau liquide.

Cratère Endurance (2004)
Après avoir quitté le cratère Eagle, le rover se dirige vers le cratère Endurance situé à 750 m. Il l'atteint le . Opportunity étudie dans un premier temps les bords du cratère en effectuant des relevés à l'aide de la caméra panoramique et du Mini-TES. Le rocher Lion Stone qui se trouve sur sa route a la même composition que les roches situées au fond du cratère Eagle. Le , les responsables de la mission décident de prendre le risque de faire descendre le rover à l'intérieur du cratère : Opportunity ne pourra peut-être pas remonter du fait de la pente mais les scientifiques pensent que des couches profondes du sous-sol observées à l'intérieur du cratère, sont susceptibles de fournir de nombreuses réponses[45]. Le rover pénètre dans le cratère en passant par un site baptisé Karatepe qui montre cinq strates rocheuses aux caractéristiques, texture et composition chimique, nettement différentiées. Les géologues en concluent qu'il s'agit de strates qui se sont formées à des dates différentes. En s'enfonçant dans le cratère, le rover analyse plusieurs rochers situés sur son trajet. Les contrôleurs renoncent à étudier les formations sableuses qui tapissent le fond du cratère de peur que le rover ne s'enlise définitivement. En remontant pour sortir du cratère, le rover analyse un rocher baptisé Wopmay qui fournit des indices ambigus sur le rôle de l'eau dans la formation des rochers situés au fond du cratère avant et après l'impact. Le rover se dirige ensuite vers une petite falaise sur la paroi interne d'Endurance baptisée Burns Cliff. La pente ne permet pas de s'approcher suffisamment de la formation pour utiliser les spectromètres mais de nombreuses photos sont prises avec la Pancam. Des couches de sédiments qui ont pu être déposées par l'eau sont identifiées. Opportunity a passé près de 180 jours martiens dans le cratère avant de remonter sans problème la pente intérieure du cratère à la fin du mois .

En route vers le cratère Victoria (2005-2006)


Désormais, Opportunity se dirige vers le cratère Victoria, situé à plus de neuf kilomètres. Au cours de son trajet, le rover passe devant le bouclier thermique, qui fait l'objet de nombreuses photographies destinées à analyser son état et en déduire le déroulement de la rentrée atmosphérique. À proximité, le rover permet de découvrir la première météorite rencontrée sur une autre planète : baptisée Heat Shield Rock, celle-ci a la taille d'un ballon de basket et les spectromètres du rover indiquent qu'elle est composée de fer et de nickel. Le rover passe successivement devant les cratères Alvin, Jason, Naturaliste et Vostok sans effectuer d'investigations approfondies. Le , Opportunity bat le record de distance parcourue en une journée martienne en progressant de 220 mètres[46]. Le , le rover est immobilisé après avoir entièrement enfoui quatre de ses roues dans une petite dune. Après un mois et demi de manœuvres prudentes, l'équipe au sol parvient à libérer Opportunity le . Entre et , le rover explore le cratère Erebus dont il étudie les nombreux affleurements rocheux. En , le moteur qui actionne la première articulation du bras (l'épaule) porte instruments tombe en panne. L'origine du problème est connue depuis l'atterrissage : l'interrupteur de la résistance chauffante de l'articulation, mal assemblé, ne fonctionne pas et le moteur est soumis à des alternances de températures qui ont fini par le gripper[47]. Le bras est débloqué mais, deux ans plus tard, en , après un incident encore plus sérieux, les contrôleurs décident de maintenir le bras étendu en permanence pour qu'il ne devienne pas définitivement inutilisable à la suite d'un nouveau blocage[48].
Cratère Victoria (2006-2008)
Fin , le cratère Victoria est atteint[49] : avec ses 800 mètres de diamètre, c'est le plus grand des cratères visités par le rover. C'est également le plus prometteur, par ses hautes parois de roches affleurantes qui devraient livrer de nouveaux indices géologiques. Les panneaux solaires, nettoyés par des tourbillons de poussière ou un phénomène lié au gel, retrouvent brièvement en toute leur efficacité avec une puissance générée de 800 Wh avant que ne s'abattent des tempêtes particulièrement violentes mi-2007 qui font chuter la puissance disponible obligeant le rover à arrêter toute opération. La NASA craint à un moment que le rover épuise complètement ses ressources électriques et endommage son électronique qui n'aurait plus été protégée du froid[50] mais le rover parvient à survivre à cet épisode. Le temps s'étant amélioré, le rover démarre en une série d'études des strates rocheuses qui s'élèvent à l'intérieur du cratère Victoria avant de quitter le cratère fin .

En route vers le cratère Endeavour (2008-2011)
Le rover quitte définitivement le cratère Victoria au début du mois de en direction du sud-est pour rejoindre le cratère Endeavour, un cratère d'environ 22 kilomètres de diamètre. Les programmeurs estiment alors que pour atteindre ce cratère distant de 12 km environ, un voyage de près de deux ans est nécessaire. Les scientifiques pensent pouvoir y découvrir des empilements de couches de roches bien plus importants que ceux observés dans le cratère Victoria[51]. De plus, grâce aux observations de la sonde Mars Reconnaissance Orbiter en orbite, des études minéralogiques et morphologiques de roches fracturées situées sur le bord du cratère Endeavour ont permis d'identifier des phyllosilicates et ces minéraux se sont probablement formés dans un milieu humide, très tôt dans l'histoire de Mars[52].
Entre le et le , le Soleil s'interpose entre la Terre et Mars et ne permet plus la communication avec les rovers. Durant cette période, l'équipe du rover a programmé Opportunity qui doit utiliser le spectromètre Mössbauer afin d'examiner un affleurement rocheux nommé Santorini[53]. Le (Sol 1820), après avoir parcouru près de 3,2 kilomètres depuis Victoria, Opportunity est pour la première fois en vue du cratère Endeavour situé à 12 kilomètres. On distingue également le cratère Iazu situé à environ 38 kilomètres[54]. Compte tenu du temps mis pour effectuer cette distance depuis Victoria, plus d'une année martienne (23 mois) devrait être nécessaire pour parvenir jusqu'à Endeavour[54].
Opportunity bénéficie le (Sol 1850) d'un nettoyage de ses panneaux solaires, générant ainsi 515 Wh supplémentaires soit une augmentation de la production d'énergie d'environ 40 %[55].
Le rover poursuit désormais sa route vers Endeavour qu'il doit atteindre en 2011. Fin , alors que l'hiver martien s'éloigne, Opportunity est toujours opérationnel et progresse rapidement. En raison des détours effectués pour éviter les dunes de sable les plus dangereuses, le rover qui a malgré tout parcouru 21,4 km depuis son arrivée sur Mars, se situe encore à 12 km du cratère Endeavour mais a sans doute réalisé la partie du trajet la plus dangereuse[56],[57]. Le rover se trouve au à moins de 4 km du cratère Endeavour[58].

Cratère Endeavour (2011-)

Le rover Opportunity atteint le cratère Endeavour le après 3 ans de traversée depuis son départ du cratère Victoria[59]. Les scientifiques de la mission ne pensent pas envoyer Opportunity à l'intérieur du cratère de 22 km de diamètre car les instruments de l'orbiteur MRO ont permis de déterminer que le terrain présentait là-bas une configuration géologique déjà observée par les rovers. Les instruments de MRO ont par contre détecté des dépôts d'argile en bordure du cratère qui sont retenus comme le prochain objectif d'Opportunity. En effet, ce type de formation géologique n'a jusqu'à présent jamais été rencontré par les rovers MER et a sans doute été créé à une époque très ancienne de Mars, où l'eau coulait à l'air libre sur Mars[60]. L'équipement scientifique du rover, qui a dépassé depuis six ans la durée de fonctionnement pour laquelle il avait été construit, est aujourd'hui en partie hors service. Le spectromètre infrarouge Mini-TES ne fonctionne plus depuis la tempête qui a frappé le rover en 2007 et la capacité de détection du spectromètre Mössbauer est devenue très faible car sa source radioactive de cobalt, d'une demi-vie de 271 jours, n'émet plus qu'une faible fraction des rayons gamma qu'elle fournissait au départ. Or, sans le Mini-TES, le spectromètre Mössbauer est le seul instrument capable d'identifier les minéraux présents. Par ailleurs, la brosse RAT fonctionne encore mais son axe est tordu ce qui rend son action peu efficace. Par ailleurs, il y a de la poussière sur l'optique des caméras panoramiques[61].

Résultats scientifiques
État des connaissances sur l'eau de Mars avant la mission MER
L'existence de l'eau sur Mars est confirmée dès 1964 par des études spectrales[62] et par les observations conduites par les sondes martiennes à partir de Mariner 9[63]. L'objectif de la mission est de trouver des indices de la présence d'eau liquide à la surface de Mars dans des conditions qui auraient permis l'apparition de la vie.
Dans les conditions régnant actuellement sur Mars, la présence d'eau liquide à la surface de la planète est impossible en raison de la faible température (en moyenne de −50 °C contre +14 °C sur Terre) et de la pression atmosphérique (6 hPa contre 1 013 hPa sur Terre). L'eau est présente uniquement sous forme de glace hydrique lorsque la température est suffisamment basse et sous forme gazeuse. La glace d'eau est présente dans le sous-sol, près des pôles (la couche de glace d'eau fait 1 km d'épaisseur aux deux pôles martiens) mais également dans certains cratères. La vapeur d'eau est peu présente dans l'atmosphère martienne (0,03 % pour 95,3 % de CO2, et des traces d'azote et d'argon) : si elle se condensait, elle donnerait une couche de glace sur toute la surface de Mars de 12 microns d'épaisseur[64].

En s'aidant des indices visibles sur le sol et en datant les terrains à l'aide de la densité observée des cratères, les scientifiques ont identifié 3 grandes périodes géologiques. Durant le Noachien, qui débute avec la formation de la planète il y a 4,6 milliards d'années et s'achève il y a 3,5-3,7 milliards d'années, Mars est très active sur le plan géologique avec des périodes caractérisées par des températures élevées et un environnement humide, un volcanisme actif et une activité tectonique. Mars bénéficie sans doute d'une atmosphère épaisse qui a pu permettre la présence d'eau liquide à la surface. Durant l'Hespérien qui s'achève selon les auteurs il y a 3,5 ou 1,8 milliard d'années, l'activité géologique se ralentit, l'atmosphère de Mars s'échappe progressivement dans l'espace ou dans le sous-sol martien entraînant la disparition de l'eau à l'état liquide à la surface de Mars. C'est une période d'intense activité volcanique. Durant l'Amazonien, qui dure depuis 2 à 3 milliards d'années, l'aridité s'installe. Il subsiste des épisodes volcaniques sporadiques allant en faiblissant, tandis que l'atmosphère continue de s'échapper avant d'atteindre le point d'équilibre actuel[a 8].
Plusieurs indices semblent montrer que l'eau a occupé de manière permanente le sol martien tels que les vallées de débâcle à fond plat et rectiligne, des effondrements de relief en forme d'écoulement, les sols polygonaux, les terrains chaotiques, les réseaux fluviatiles, des indices de présence de lacs ou d'océans. Toutes ces formations ont plus de 3,8 milliards d'années[65]. Si les spécialistes sont d'accord sur les grandes lignes de l'histoire géologique martienne, il n'y a pas de consensus sur le reste : quelle quantité d'eau était présente à la surface et durant combien de temps, où cette eau s'est-elle échappée…
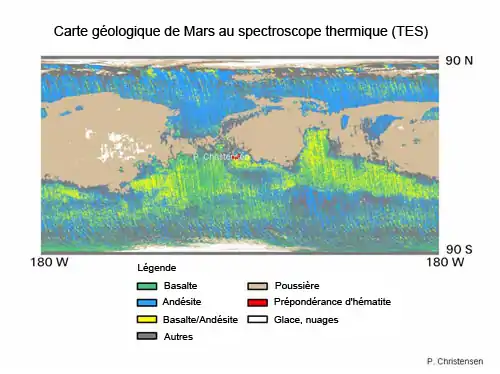
Hématite grise
De grandes concentrations d'hématite grise ont été repérées dans une zone proche à la fois de l'équateur et du méridien zéro martien, nommée pour cette raison Terra Meridiani (latitude 2° sud, longitude 0° à 5° ouest) par le spectromètre thermique TES de la sonde Mars Global Surveyor. L'hématite est un oxyde de fer dont la formule chimique est Fe2O3. L'hématite peut être comparée à de la rouille, mais sur Terra Meridiani, elle se présente sous forme d'hématite cristalline grise, susceptible d'avoir été créée en présence d'eau. Ce type de formation peut être formé par l'activité volcanique, ou par l'action de l'eau. C'est la raison qui explique le site d'atterrissage du rover Opportunity dans cette région, sur le plateau de Meridiani Planum[66].

L'intérêt des planétologues pour l'hématite grise provient du lien entre la présence de ce minerai et celle de l'eau liquide, bien que celle-ci ne soit pas forcément associée à la formation de cet oxyde de fer. En effet, l'origine de l'hématite grise sur Terre fait l'objet de plusieurs scénarios :
- formation de l'hématite en même temps que les roches environnantes :
- minerai de fer rubané : une roche sédimentaire comportant 15 % de fer se forme dans de vastes étendues d'eau, sous l'action de l'oxygène dégagé par des microorganismes photosynthétiques. Sur Terre, ces sédiments peuvent héberger des fossiles de microorganismes,
- hématite hydrothermale : l'eau chaude qui circule dans les fissures de la croûte permet la précipitation de nombreux minéraux riches en fer, dont l'hématite,
- oxydation thermique : une activité volcanique entraîne l'oxydation thermique d'un oxyde de fer de formule Fe3O4, la magnétite. Ce scénario n'implique pas la présence d'eau liquide ;

- dépôt d'hématite sur des roches préexistantes :
- lessivage : des hydroxydes de fer sont formés à la suite du lessivage de roches riches en fer par des eaux froides et acides, puis ils sont transportés par les liquides en circulation avant d'être redéposés notamment sous forme d'hématite lorsque l'acidité du fluide (ou d'autres paramètres) change,
- patine désertique : sur Terre, les roches des déserts peuvent être couvertes d'une patine sombre de très faible épaisseur et d'une composition chimique indépendante de la pierre support, formée par des microorganismes capables d'oxyder le fer apporté par l'eau ou le vent,
- hydrothermalisme : les fluides en circulation dans les fissures de la roche entraînent la précipitation de l'hématite sur des roches préexistantes.
Données géologiques recueillies par les astromobiles (MER)
Les débuts de l'exploration du cratère Gusev par l'astromobile Spirit ont été décevants car aucune preuve évidente de l'action de l'eau n'a été découverte mais une fois les collines Columbia atteintes, plusieurs sites ont prouvé que l'eau avait contribué à façonner certaines formations géologiques. Mais ce rôle semble lié à une activité volcanique plutôt qu'à des dépôts marins ou lacustres. L'astromobile Opportunity a par contre découvert des minéraux probablement créés par l'eau et des indices de sédiments laissés par des plans d'eau[67].
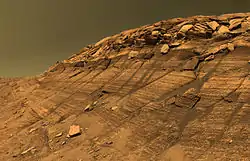
Le cratère Eagle
Les flancs intérieurs du petit cratère Eagle dans lequel Opportunity s'est posé sont couverts d'affleurements disposés en strates sur une hauteur d'environ 75 cm. Celles-ci se présentent selon une coupe presque verticale ce qui facilite leur analyse. Les instruments du robot Opportunity fournissent d'excellents indices prouvant que les strates rocheuses soit étaient autrefois submergées, soit se sont formées dans l'eau. Les roches analysées sont riches en sulfures. La jarosite qui est un sulfate de fer hydraté est notamment détecté, or celui-ci se forme en présence d'eau[68],[69]. La morphologie des roches semble également indiquer l'action de l'eau.


Par ailleurs, des sphérules de 2 à 3 mm de diamètre sont enkystées dans ces strates. Nombre d'entre elles s'en sont détachées du fait de la désagrégation des lamelles de roches et jonchent le sol. Ces petites sphères de couleur grise nommées « myrtilles », sont très riches en hématite[70]. Plusieurs hypothèses ont été proposées pour expliquer leur origine :
- de la roche fondue pulvérisée en l'air par un volcan. Ce scénario est abandonné car leur répartition est jugée trop uniforme ;
- des tectites, formées lors d'un impact de météorite qui aurait projeté des billes de roche fondue. Cette hypothèse n'a pas été retenue en raison du nombre trop important de sphérules dans les strates rocheuses ;
- des concrétions formées par le dépôt de minéraux lors du passage de l'eau dans la roche ;
- des concrétions sédimentaires formées en milieu lacustre ;
- des concrétions d'origine bactérienne ou même des fossiles. Cette hypothèse ne peut pas être testée directement car les rovers ne sont pas équipés d'instruments permettant de mesurer la présence de minéraux carbonatés ou de matières organiques.

Les observations par la caméra microscope ont révélé que certaines roches du cratère Eagle présentent des cavités de forme géométrique qui pourraient correspondre à l'emplacement de cristaux de gypse qui se forment par évaporation en bordure d'une mer ou d'un lac salé. La caméra microscope du rover Opportunity a permis d'observer des microcavités de quelques millimètres de long à la surface des rochers El Capitan et Guadalupe. La présence de ces petites cavités en forme d'aiguilles peut s'expliquer de la façon suivante :
- le matériau initial serait une argile imbibée d'eau, sachant que le plateau de Meridiani Planum où Opportunity s'est posé s'est formé il y a plus de 3,8 milliards d'années ;
- une phase d'évaporation entraîne l'apparition de cristaux, qui peuvent être composés de sulfates de fer, de calcium ou de magnésium, dont la présence a été relevée par les spectroscopes des rovers ;
- ces cristaux croissent en repoussant l'argile qui les entoure et en prenant la forme d'aiguilles ;
- une phase de dissolution entraîne la disparition des cristaux, qui laissent en place les cavités qu'ils ont creusées, qui sont nommées sur les roches terrestres des pseudomorphoses ;
- après la formation de ces pseudomorphoses, des sphérules se sont formées dans les cavités laissées libres par les cristaux. La présence de myrtilles dans les microcavités est un argument en faveur de l'origine par concrétion des sphérules.
Roches comportant des structures polygonales

Des rochers présentant en surface des structures polygonales sont observés par Opportunity notamment sur le rocher Escher sur les pentes sud-ouest du cratère Endurance[71]. D'autres rochers voisins au fond de ce cratère présentent également ces structures polygonales. Ces roches présentent une surface plate montrant des réseaux de fissures divisant la partie supérieure en polygones. Leur apparence est quelque peu semblable à l'aspect de la boue craquelée après que l'eau s'est évaporée[72].
Les six premiers mois d'analyses effectuées par le rover Opportunity ont démontré que la zone explorée était humide par le passé. Celle-ci a ensuite séché et s'est érodée pour former une large plaine.
Plusieurs hypothèses sont émises pour expliquer l'origine des fissures qui divisent la surface des roches en polygones :
- elles peuvent résulter de l'impact ayant créé le cratère Endurance ;
- une autre raison serait liée à la disparition de l'eau présente dans la roche lors de sa formation ;
- les fissures ont aussi pu se créer beaucoup plus tard après la formation de la roche. La création du cratère a pu dégager la roche en la ramenant à la surface. Elle serait alors devenue de nouveau humide puis le séchage aurait fait apparaître ces fissures polygonales.
Certains résultats vont dans le sens de la dernière hypothèse.
Le spectromètre Alpha Particle à Rayons X (APXS) du rover Opportunity a permis de faire une étude comparative de la surface des roches selon leur emplacement dans le cratère Endurance. Les roches les plus profondes du cratère sont chimiquement plus modifiées que des roches situées à des niveaux plus élevés. Cette différence chimique peut résulter d'un contact avec de l'eau. Le graphique ci-contre compare pour différents composants chimiques et pour différentes profondeurs de roche, le rapport des teneurs entre d'une part la roche Escher située en profondeur dans le cratère et la roche Virginia proche du bord. La ligne rouge représente les mesures à la surface des roches, la ligne bleue correspond aux mesures après brossage des roches, les lignes vertes sont liées aux teneurs mesurées après forage par l'outil RAT. Le rapport des teneurs entre les deux types de roches varie de façon très significative en fonction de la profondeur, pour le chlore (Cl) et le soufre (SO3O). Ceci implique que la surface d'Escher a davantage varié chimiquement que la surface de Virginia pour ces deux éléments. Des analyses sont menées pour comprendre le rôle joué par l'eau sur cette différence chimique[73].
Les études réalisées par les deux rovers Spirit et Opportunity respectivement dans le cratère Gusev, au sud d'Apollinaris Patera, et sur Meridiani Planum, suggèrent l'existence passée d'une hydrosphère (la partie de la planète couverte par les eaux) suffisamment importante pour avoir pu homogénéiser le taux de phosphore des minéraux analysés sur les deux sites explorés par les rovers pourtant situés de part et d'autre de la planète[74].
Observations météorologiques

La vapeur d'eau contenue dans l'atmosphère martienne se condense parfois en glace pour former des nuages de cristaux d'H2O. Le dioxyde de carbone peut également se condenser en formant des cristaux de CO2 dépassant 1 µm de diamètre, à des altitudes plus élevées que ceux constitués de glace d'eau. Les nuages qui en résultent, aux formes similaires aux cirrus terriens, ont été observés par les rovers.
L'atmosphère martienne est constamment chargée en poussières, dont les grains ont un diamètre moyen de l'ordre de 1,5 µm, responsable de la teinte rouge orangé du ciel martien[76]. Cette poussière est continuellement injectée dans l'atmosphère par des tourbillons de poussière[77] (dust devils en anglais), comme celui observé ci-dessous par le rover Spirit le [78] ; les prises de vue durent 575 s (ce qu'indique le compteur de l'angle inférieur gauche), et trois autres tourbillons sont brièvement visibles au loin dans la moitié droite de la vue, au début de la séquence, puis près du tourbillon principal, puis à la fin.
Couleurs de Mars

Les couleurs des photos prises par le robot Spirit ont fait l'objet de polémiques. En effet, sur certaines présentations le ciel est bleu, sur d'autres, certaines zones du robot qui étaient bleu vif sur des photographies prises sur terre sont rouges sur celles prises sur Mars. La différence de couleurs des clichés des sondes MER est explicable : les équipements photographiques embarqués sur les sondes de la NASA et de l'ESA prennent des clichés en niveaux de luminosité au travers de filtres. Les sondes MER sont en partie équipées de plusieurs filtres décalés dans l'infrarouge. Les images finales sont reconstituées par synthèse additive de trois clichés filtrés différents, pris comme composantes rouge, verte et bleue de l'image finale[79],[80]. L'imagerie en fausses couleurs est une technique pour représenter ce qui n'est pas visible ordinairement (généralement un déplacement spectral). La plupart des clichés effectués par les télescopes (comme ceux d'Hubble) ou des caméras infrarouges utilisent ce procédé. Si nous voyons ces zones du spectre non visibles, c'est qu'il s'agit par définition de fausses couleurs. La NASA a par ailleurs publié, fin , un article sur la coloration des images des sondes MER. Par ailleurs, les cadrans solaires placés sur les rovers portent des carrés de peinture servant à l'étalonnage des couleurs des photographies (voir ci-contre).
Comportement des astromobiles

Les astromobiles ont été conçus pour fonctionner au minimum durant 90 jours martiens et parcourir 600 m à la surface de Mars. Ces objectifs atteints par le robot Spirit le ont été dépassés au-delà des espérances de leurs concepteurs. Il n'était pas prévu que les rovers survivent au premier hiver martien caractérisé par une forte diminution de l'intensité lumineuse d'autant que l'accumulation progressive de la poussière devait diminuer le rendement des panneaux solaires. Or, Opportunity a survécu en à cinq hivers martiens. Au cours du premier hiver, l'énergie disponible est passée pour Spirit de 900 watts-heures par jour à 400 watts-heures par jour. Opportunity est descendu à 500 Wh/j, mais il est revenu à 900 Wh/j à la surprise de l'équipe de contrôle sur Terre. Ce retour de la puissance électrique est lié à une situation géographique plus favorable pour l'ensoleillement, mais aussi à un dépoussiérage des panneaux solaires selon un mécanisme mal compris. Le nettoyage des panneaux solaires semble s'être déroulé pendant la nuit martienne, car une augmentation de 5 % de la puissance disponible a été constatée à quatre reprises sur une période de 6 mois. Les hypothèses évoquées pour expliquer ce dépoussiérage font appel au vent, au gel, et au fait qu'Opportunity est resté en position inclinée durant une longue période au cours de son exploration des parois du cratère Endurance.
Les deux rovers ont été confrontés très tôt au grippage de certaines de leur roues. À partir de , la roue avant droite de Spirit a présenté une résistance interne accrue qui a provoqué une consommation d'énergie électrique de plus en plus importante de son moteur. Après avoir tenté de redistribuer du lubrifiant vers cette roue, la stratégie adoptée a consisté à faire progresser Spirit en marche arrière, et à n'utiliser le moteur de cette roue qu'en cas de besoin.
Les instruments scientifiques ont fait preuve d'une longévité remarquable malgré quelques incidents. En , la NASA a constaté que les capteurs des spectromètres APXS ont été intervertis durant l'assemblage des deux rovers et utilisaient les données de calibrage l'un de l'autre. Les données obtenues par les spectromètres ont dû être corrigées. Selon la NASA, l'erreur causée par l'inversion serait inférieure aux incertitudes de mesure et aucune conclusion scientifique n'est remise en cause.
Le , alors qu'il progresse en direction du cratère Erebus, Opportunity se retrouve enlisé à 200 m de celui-ci, dans un monticule de sable, ses six roues enfouies à 80 % dans un matériau sombre très fin, ayant la consistance du talc et déposé par les vents. Le monticule ne fait que 30 cm de haut et ne présente pas de particularité par rapport aux autres ondulations parcourant la plaine. Les techniciens du Jet Propulsion Laboratory doivent manœuvrer durant cinq semaines pour faire reculer Opportunity centimètre après centimètre. Le , la roue avant droite parvient mord dans un sol plus ferme se trouvant sous la couche de poussière. Le rover peut se dégager suffisamment pour que les autres roues reprennent contact avec un terrain solide et stable.
Au fil des années d'expériences passées sur Mars et des mises à jour de son logiciel de navigation, Opportunity devient de plus en plus autonome. En 2010, il est ainsi capable de contourner des obstacles sans aucune intervention des opérateurs sur Terre ou encore de sélectionner de lui-même des roches pour analyses en fonction de critères précis comme la taille, la forme et la luminosité[81].
Fin , après 2 294 jours passés sur le sol martien, Opportunity a dépassé les 21,7 kilomètres parcourus sur Mars, soit 36 fois la distance prévue et plus de 25 fois la durée nominale de la mission[57]. En , le rover Opportunity a parcouru plus de 42,195 kilomètres, soit la distance d'un marathon[82].
Suites de la mission : MSL et Mars Sample Return

La NASA a donné une suite à la mission Mars Exploration Rover et au lancement en 2011 (initialement prévu en 2009) de la mission Mars Science Laboratory rebaptisé Curiosity. Celle-ci, développée avec la coopération de plusieurs pays européens pour l'instrumentation scientifique, repose sur un rover de 775 kg (contre 185 kg pour les MER) dont 70 kg d'instruments scientifiques (contre 6 kg pour Spirit et Opportunity) : ces derniers sont en partie consacrés à la recherche de la vie sur Mars. Ce rover n'utilise plus l'énergie solaire, mais un générateur thermoélectrique à radioisotope utilisant une source radioactive ; cette source d'énergie devrait lui permettre une autonomie bien plus grande (jusqu'à 100 km sur 1 000 jours) et l'emploi d'un laser de puissance permet de sublimer sur 5 mm de diamètre un caillou à neuf mètres de distance et d'analyser le plasma généré par un spectromètre UV. De plus, le rover peut travailler en permanence sans se soucier du cycle des saisons. Grâce à une nouvelle technique de rentrée atmosphérique et d'atterrissage, le rover peut se poser avec une précision améliorée (ellipse de 20 × 20 km contre 20 × 150 km pour MER) et la région du site d'atterrissage est beaucoup plus vaste : altitude maximum de 2 km au lieu de 1,3 km et latitude comprise entre -60° et + 60° (MER : -15° et + 10°). La circulation sera facilitée par une garde au sol de 66 cm (30 cm pour MER)[83].
Mars Sample Return est une mission très ambitieuse qui doit être développée en coopération par la NASA et l'Agence spatiale européenne à une échéance beaucoup plus lointaine (au-delà de 2020). L'objectif de cette mission est de ramener sur Terre des échantillons du sol martien. Dans le dernier scénario élaboré fin 2009, elle implique le lancement de trois sondes distinctes. Lors de la première mission, un rover est chargé de prospecter le sol martien et de collecter des échantillons. Une deuxième mission lancée quatre ans plus tard emporte un rover simplifié chargé d'aller chercher les échantillons collectés par le premier rover et de les ramener jusqu'au module d'atterrissage de la deuxième sonde qui comprendra également un étage de remontée. Ce dernier placera le compartiment contenant les échantillons en orbite martienne avant d'effectuer une manœuvre de rendez-vous avec une troisième sonde chargée de ramener les échantillons sur Terre. La mission est aujourd'hui à l'état de projet[84].
Opérations de communication de la NASA autour de la mission

Les noms de baptême des deux astromobiles Spirit et Opportunity ont été choisis le à l'issue d'un concours organisé par la NASA. La lauréate est une jeune fille de neuf ans nommée Sofi Collis, née en Sibérie et adoptée par une famille américaine vivant en Arizona[85],[86].
La NASA a envoyé, fixé à l'atterrisseur de Mars, un DVD contenant quatre millions de noms de personnes ayant demandé à être inscrits sur ce mémorial qui devrait rester intact durant des milliards d'années.
Deux astéroïdes dont l'orbite de 7,9 ans est située entre Mars et Jupiter ont été baptisés en hommage aux rovers : (37452) Spirit a un diamètre de 4 à 9 kilomètres et l'astéroïde (39382) Opportunity a un diamètre de 3 à 7 kilomètres. Tous deux ont été découverts le par Ingrid van Houten-Groeneveld, Cees J. van Houten et Tom Gehrels à l'aide des télescopes de l'observatoire du Mont Palomar du California Institute of Technology. Ils font partie d'une petite catégorie d'astéroïdes, baptisée groupe de Hilda, qui ont une résonance d'orbitale de 3:2 avec Jupiter : chaque fois que Jupiter accomplit deux orbites autour du Soleil, ces astéroïdes en accomplissent trois.
Plusieurs lieux ont été baptisés pour honorer la mémoire d'astronautes décédés au cours des missions de la NASA. Le site d'atterrissage du rover Spirit a été nommé la Columbia Memorial Station et des collines ont été nommées Columbia Hills, en mémoire des sept astronautes qui ont péri lors de l'accident de la navette spatiale Columbia, lors de la phase de traversée de l'atmosphère de la mission STS-107, le . Une plaque commémorative en aluminium d'un peu plus de 15 centimètres de diamètre, a été fixée au dos de l'antenne à grand gain qui permet à Spirit de communiquer directement avec la Terre. Des collines entourant le site d'atterrissage du rover Spirit portent le nom des astronautes décédés dans l'incendie d'Apollo 1 Virgil I. « Gus » Grissom, Edward White et Roger B. Chaffee.
Notes et références
Notes
- ↑ Cet angle est nettement moindre que celui de la trajectoire de Mars Pathfinder (14,5°) pour allonger la phase de freinage atmosphérique et ainsi compenser l'augmentation de la masse de la sonde tout en étant suffisamment important pour éviter le risque de rebondir sur l'atmosphère martienne (vers 11°).
- ↑ Les airbags ont été, par ailleurs, renforcés pour les mêmes raisons.
- ↑ Au lieu de s'ouvrir lorsque la pression dynamique est de 700 N/m2, le parachute de Spirit doit s'ouvrir dès que la valeur de 725 N/m2 est atteinte et celui d'Opportunity à 750 N/m2.
Références
- 1 2 The Scientific Exploration of Mars, p. 114-115.
- ↑ (en) NASA, « Mars Exploration rover mission : objectives », .
- ↑ (en) Albert Haldermann, Joy Crisp, John Galles, « Mars Exploration project » [PDF], JPL - NASA, .
- ↑ (en) « Mars Exploration Rover Mission - Spacecraft: Cruise Configuration », NASA / JPL, .
- ↑ (en) « Mars Exploration Rover Mission - Spacecraft: Aeroshell », NASA / JPL, .
- 1 2 (en) « Mars Exploration Rover Mission - Spacecraft: Lander », NASA / JPL, .
- ↑ (en) « Mars Exploration Rover Mission - Spacecraft: Airbags », NASA / JPL, .
- 1 2 3 4 5 6 (en) Brian Wilcox, Mark Maimone, Andy Mishkin (NASA/JPL), « Robotics Mission Experience from Mars » [PDF], .
- ↑ (en) B. V. Ratnakumar, M. C. Smart, L.D. Whitcanack, R. C. Ewell and S. Surampudi, « Li-Ion Rechargeable Batteries on Mars Exploration Rovers » [PDF], NASA/JPL, .
- ↑ (en) « Mars exploration rover mission - Communications With Earth - How the rovers can communicate through Mars-orbiting spacecraft », NASA / JPL, .
- 1 2 3 Labrot, « Mars exploration rover », .
- 1 2 (en) « Mars exploration rover mission - Communications With Earth - How Fast and How Much Data the Rovers Can Send Back », NASA / JPL, .
- ↑ (en) « Mars exploration rover mission - Communications With Earth - Preventing "busy signals" », NASA / JPL, .
- ↑ (en) A.J.S. Rayl, « Planetary News: Mars Exploration Rovers (2008)-Mars Exploration Rovers Update: As Spirit and Opportunity Rove On, We Look Back on 2008 », The Planetary Society, .
- ↑ (en) Rupert Scammell, « Mars Exploration Rover Technical Data - The Mars Exploration Rover Maintenance Manual », .
- 1 2 3 (en) Jeffrey J. Biesiadecki, P. Chris Leger et MarkW. Maimone, « Tradeoffs Between Directed and Autonomous Driving on the Mars Exploration Rovers » [PDF], NASA / JPL, .
- 1 2 3 (en) Jeffrey J. Biesiadecki and MarkW. Maimone, « The Mars Exploration Rover Surface Mobility Flight Software: Driving Ambition » [PDF], NASA / JPL, .
- 1 2 (en) Mark W. Maimone and P. Chris Leger and Jeffrey J. Biesiadecki, « Overview of the Mars Exploration Rovers' Autonomous Mobility and Vision Capabilities » [PDF], NASA / JPL, .
- ↑ (en) Site Mars Exploration Rover de la NASA : The Panoramic Camera (Pancam).
- ↑ (en) Site Mars Exploration Rover de la NASA : Miniature Thermal Emission Spectrometer (Mini-TES).
- ↑ Site Mars Exploration Rover de la NASA : Alpha Particle X-Ray Spectrometer (APXS).
- ↑ The new Athena alpha particle X-ray spectrometer for the Mars Exploration Rovers, R. Rieder, R. Gellert, J. Brückner, G. Klingelhöfer, G. Dreibus, A. Yen, S. W. Squyres, J. Geophysical Research, 2003, vol. 108, p. 8066, 10.1029/2003JE002150.
- ↑ Site Mars Exploration Rover de la NASA : Mössbauer Spectrometer (MB).
- ↑ (en) G. Klingelhöfer, B. Bernhardt, J. Foh, U. Bonnes, D. Rodionov, P. A. De Souza, C. Schroder, R. Gellert, S. Kane, P. Gutlich et E. Kankeleit, The miniaturized Mössbauer spectrometer MIMOS II for extraterrestrial and outdoor terrestrial applications: A status report, vol. 144, Hyperfine Interactions, (DOI 10.1023/A:1025444209059), p. 371-379
- ↑ Site Mars Exploration Rover de la NASA : Rock Abrasion Tool (RAT).
- ↑ (en) Site Mars Exploration Rover de la NASA : The Microscopic Imager.
- ↑ Site Mars Exploration Rover de la NASA : Magnet Arrays.
- 1 2 (en) « Mars Exploration Rovers' Flight Software »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?) [PDF] (consulté le ).
- ↑ (en) Site Mars Exploration Rover de la NASA : The rover's "brains".
- ↑ (en) « Launch Event Details », Jet Propulsion Laboratory, 12 juillet 2007 (consulté 7 mai 2010).
- ↑ (en) « Launch Sequence Details », Jet Propulsion Laboratory, 12 juillet 2007 (consulté 7 mai 2010).
- 1 2 3 4 (en) « Mars Exploration Rovers rover Landings Press kit » [PDF], NASA JPL, .
- 1 2 (en) Robert A. Mitcheltree, « Mars Exploration Rover mission: entry, descent, and landing system validation » [PDF], .
- 1 2 (en) Mark Adler (JPL), « Engineering Constraints on MER Landing Sites » [PDF], .
- ↑ R. Braun et R Manning, p. 1-9.
- ↑ (en) « A Computational Intelligence Approach to the Mars Precision Landing Problem »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?) [PDF] (consulté le ).
- 1 2 3 4 (en) Prasun N. Desai et Philip C. Knocke, « Mars Exploration Rovers Entry, Descent, and Landing Trajectory Analysis - § EDL overview » [PDF], .
- ↑ (en) Behzad Raiszadeh, Eric M. Queen (NASA Langley), « Mars exploration rover terminal descent mission modeling and simulation » [PDF], .
- ↑ (en) A.J.S. Rayl, « Mars Exploration Rovers Update - Spirit Cruises to New Target, ‘White Boat’ Opportunity Uncovers Mystery Spheres », The Planetary Society, .
- ↑ (en) David Leonard, « Spirit Gets A Dust Devil Once-Over », Space.com, .
- ↑ (en) Amos Jonathan, « Mars robot unearths microbe clue - NASA says its robot rover Spirit has made one of its most significant discoveries on the surface of Mars. », BBC News, .
- ↑ (en) Bertster Guy, « Mars Rover Investigates Signs of Steamy Martian Past », Jet Propulsion Laboratory, Pasadena, Californie, .
- 1 2 (en) NASA, « Spirit update », .
- ↑ (en) NASA, « Spirit update », .
- ↑ (en) NASA, « Mars Rover Opportunity Gets Green Light To Enter Crater », .
- ↑ (en) « Opportunity updates 2005 », NASA, fin 2005.
- ↑ (en) « Spirit Descends Husband Hill as Opportunity Works at a Standstill on Olympia », The Planetary Society, .
- ↑ (en) A.J.S. Rayl, « Spirit Presses On, Opportunity Roves On as Martian Winter Sets In », The Planetary Society, .
- ↑ (en) A.J.S. Rayl, « Spirit Perseveres, Opportunity Arrives at Victoria Crater », The Planetary Society, .
- ↑ (en) « Mars Exploration Rover Status Report Concern Increasing About Opportunity », NASA (consulté le ).
- ↑ (en) NASA's Mars Rover to Head Toward Bigger Crater, Jet Propulsion Laboratory. Consulté en juillet 2010.
- ↑ (en) J. J. Wra et al., « Phyllosilicates and sulfates at Endeavour Crater, Meridiani Planum, Mars », Geophysical research letters, vol. 36, no L21201, , p. 5 (DOI 10.1029/2009GL040734, lire en ligne [PDF]).
- ↑ (en) sol 1709-1715, November 13-19, 2008: Opportunity Prepares for Two Weeks of Independent Study, Jet Propulsion Laboratory. Consulté en juillet 2010.
- 1 2 (en) One Mars Rover Sees a Distant Goal; The Other Takes a New Route, Jet Propulsion Laboratory, Press Releases, 18 mars 2009. Consulté en juillet 2010.
- ↑ (en) sol 1844-1851, April 01-08, 2009: Cleaning Event Boosts Energy, Jet Propulsion Laboratory, Press Releases, 18 mars 2009. Consulté en juillet 2010.
- ↑ (en) A.J.S. Rayl, « Spirit Rests on Big Find, Opportunity Finishes Half-Marathon on Way to Endeavour », The Planetary Society, .
- 1 2 (en) « Opportunity Mission Manager Reports », NASA (consulté le ).
- ↑ « Opportunity status », NASA (consulté le ).
- ↑ Communiqué de presse de la NASA annonçant l'arrivée du rover sur le site.
- ↑ (en) « NASA Rover Arrives at Huge Mars Crater After 3-Year Trek », Space.com (consulté le ).
- ↑ (en) Emily Lakdawalla, « Wheels on Cape York! », The planetary society (consulté le ).
- ↑ (en) R. A. Schorn, « The Spectroscopic Search for Water on Mars: a History », Planetary Atmospheres, Proceedings from 40th IAU Symposium, , p. 230-231 (lire en ligne).
- ↑ (en) S. W. Squyres, « The History of Water on Mars », Annual Review of Earth and Planetary Sciences, vol. 12, , p. 83-84 (lire en ligne).
- ↑ Pierre Thomas, « Les dernières nouvelles de l'eau sur Mars » [PDF], .
- ↑ (en) « Mars Express : Water », Agence spatiale européenne, .
- ↑ NASA_Science_news2001">(en) NASA Science news, « The Lure of Hematite », .
- ↑ (en) « Planetary Remote Sensing - The Exploration if Extraterrestrial - Missions to Mars during the third Millenium »(Archive.org • Wikiwix • Archive.is • Google • Que faire ?) (consulté le ).
- ↑ (en) I. Fleischer et al., « The Miniaturised Mössbauer Spectrometers MIMOS II on MER: Four Years of Operation - A Summary », 39th Lunar and Planetary Science Conference, , p. 2 (lire en ligne [PDF]).
- ↑ (en) A.J.S. Rayl, « Mars Exploration Rovers Update -Opportunity Finds Evidence of Past Liquid Water », .
- ↑ (en) Guy Webster, « Press Releases -Mars Rover Pictures Raise ‘Blueberry Muffin’ Questions », (consulté en ).
- ↑ (en) JPL -(Opportunity updates), « RAT is Rearin' to Go! », (consulté en ).
- ↑ Pierre Thomas, « Mars, les nouvelles de mi-octobre 2004 : du méthane, des fentes de dessiccation, des sédiments dans Gusev. », ENS Lyon, .
- ↑ (en) JPL -(Opportunity Press Release), « Chemical Changes in ‘Endurance’ Rocks », (consulté en ).
- ↑ (en) James P. Greenwood et Ruth E. Blake, « Evidence for an acidic ocean on Mars from phosphorus geochemistry of Martian soils and rocks », Geology, vol. 34, no 11, , p. 953-956 (ISSN 1943-2682, DOI 10.1130/G22415A.1, lire en ligne).
- ↑ (en) « Watching Martian Clouds Go By », NASA Mars Exploration Rover Mission, JPL, 24 mars 2008.
- ↑ (en) M. T. Lemmon, M. J. Wolff, M. D. Smith, R. T. Clancy, D. Banfield, G. A. Landis, A. Ghosh, P. H. Smith, N. Spanovich, B. Whitney, P. Whelley, R. Greeley, S. Thompson, J. F. Bell et S. W. Squyres, « Atmospheric Imaging Results from the Mars Exploration Rovers: Spirit and Opportunity », Science, vol. 306, no 5702, , p. 1753-1756 (ISSN 0036-8075, DOI 10.1126/science.1104474, lire en ligne).
- ↑ (en) Conway B. Leovy, « Mars: The devil is in the dust », Nature, vol. 424, , p. 1008-1009 (ISSN 0028-0836, DOI 10.1038/4241008a, lire en ligne).
- ↑ (en) « Spirit's Wind-Driven Traveler on Mars (Spirit Sol 486) », JPL -Press Release Images: Spirit, (consulté en ).
- ↑ (en) areo, « PanCam true color images from Spirit and Opportunity Mars Exploration Rovers » (consulté en ).
- ↑ (en) JPL, « Panoramas: Spirit », (consulté en ).
- ↑ « Opportunity plus intelligent avec le temps », Ciel et Espace, no 482, juillet 2010, p. 30-32.
- ↑ NASA's Opportunity Mars Rover Finishes Marathon, Clocks in at Just Over 11 Years
- ↑ (en) « MSL », CNES, .
- ↑ (en) Alan Boyle, « Bringing back Mars life », .
- ↑ (en) A.J.S. Rayl, « NASA Names Mars Exploration Rovers Spirit and Opportunity », The Planetary Society, .
- ↑ (en) Don Savage, « Girl with Dreams Names Mars Rovers ‘Spirit’ and ‘Opportunity’ », NASA, .
- Présentation de la mission pour la presse rédigée en 2003 (voir dans la bibliographie)
Voir aussi
Bibliographie
- (en) Frédéric W. Taylor, The Scientific Exploration of Mars, Cambridge, Cambridge University Press, , 348 p. (ISBN 978-0-521-82956-4, 0-521-82956-9 et 0-521-82956-9, LCCN 2009039347).
- (en) NASA, Mars Exploration Rover Launches Press Kit, (lire en ligne [PDF]) Synthèse pour la presse de la mission publiée avant le lancement des sondes MER.
- (en) R. Braun et R Manning, Mars Exploration Entry, Descent and Landing Challenges, (lire en ligne)Description technique du problème soulevé par l'atterrissage sur Mars (EDL) et des solutions par deux spécialistes du JPL.
- (en) J. Taylor, A. Makovsky, A. Barbieri, R. Tung, P. Estabrook et A. Gail Thomas (JPL), Mars Exploration Rover Telecommunications, (lire en ligne)Description technique du système de télécommunications mis en œuvre par les astromobiles MER et retour d'expérience.
- (en) Paolo Ulivi et David M Harland, Robotic Exploration of the Solar System Part 3 Wows and Woes 1997-2003, Springer Praxis, , 529 p. (ISBN 978-0-387-09627-8, lire en ligne)Description détaillée des missions (contexte, objectifs, description technique, déroulement, résultats) des sondes spatiales lancées entre 1997 et 2003.
- (en) Peter J. Westwick, Into the black : JPL and the American space program, 1976-2004, New Haven, Yale University Press, , 413 p. (ISBN 978-0-300-11075-3) — Histoire du Jet Propulsion Laboratory entre 1976 et 2004.
- (en) Erik M. Conway, Exploration and engineering : the Jet propulsion laboratory and the quest for Mars, Baltimore, Johns Hopkins University Press, , 418 p. (ISBN 978-1-4214-1605-2, lire en ligne) — Histoire du programme d'exploration martien du Jet Propulsion Laboratory.
Articles connexes
- Géologie de Mars
- Exploration de la planète Mars
- Mars Science Laboratory, astromobile américain, à pied d'œuvre en 2012
- Viking 1 et Viking 2, premiers atterrisseurs martiens américains
- Mars Pathfinder, premier astromobiles sur Mars
- Steve Squyres, responsable de la mission MER
Liens externes
- (en) Portail de la NASA consacré aux rovers de la mission MER
- Site de l'ENS Lyon qui suit l'actualité des sondes martiennes
- (en) « Mars Exploration Rovers », The Planetary Society : articles fouillés et fréquents sur l'activité des rovers
- « Mars Exploration Rover (MER) », sur nirgal.net : un site très complet sur la planète Mars et le programme d'exploration
- « Robots sur mars », sur Dailymotion : vidéo documentaire de National Geographic sur la mission MER
- (en) « Mars Exploration Rovers 3D Model », sur solarsystem.nasa.gov, NASA